Arduino robotite loomiseks mõeldud valmisraamide ülevaade. Arduino robotite loomiseks mõeldud valmisraamide ülevaade Kahe- ja kolmerattaline šassii sõidurobotite loomiseks
Ühe liitiumioonelemendi 18650 nimipinge on 3,6-3,7 V. Täislaetud element toodab 4,1-4,2 V. Kuid minimaalse pingega on see keerulisem - lõplik tühjenemispinge sõltub aku tüübist ja see näitaja võib kõikuda 2,6-3,2 V piires. Võite tühjendada madalamal, kuid see Õige tee aku kiirele lagunemisele. Otsustasin aku tekitatava pinge hinnangut nominaalse-maksimaalse vahemikuga karmistada. Siis selgub, et kahe-, kolme- ja neljaseeria aku komplektid annavad meile vahemiku 7,2-8,4 V, 10,8-12,6 V, 14,4-16,8 V. Sellisest komplektist peame saama kaks pinget - natuke pinget, et toita mootorid ja 5 V elektroonika toiteks. Kahest akust koosnev koost võib toita mootoreid 6 V pingega, kasutades alalis-alalisvoolumuundurit, kuid minimaalse pinge (kui aku tühjeneb nimiväärtuseni, on see 7,2 V) ja 6 V erinevus on umbes 1,2 V, millest ei pruugi piisata alalis-alalisvoolu muunduri stabiilseks tööks – probleemide vältimiseks peab selle sisendi ja väljundi pinge vahe olema vähemalt 2 V (tegelikult võib olema vähem madala väljalangemisega muundajate jaoks, kuid me ei keskendu neile). Meile sobib kolmest elemendist koosnev sõlm, mille jaoks vajalikud pinged saadakse alalis-alalisvoolu muundurite abil. Mootoreid saab toita 9 V, siis saame halvimal juhul vahe 1,8 V, millest peaks täiesti piisama. Sobib ka neljast elemendist koosnev komplekt, kuid peate mõistma, et lisaaku on ülekaal ja ruumi see võtab, kuigi kogu aku energiatarve on suur.
Teine võimalus toiteallika korraldamiseks on kasutada samade akude paralleelühendusi ja võimendusalalis-alalisvoolu muundurit. Seejärel saab 3,6-4,2 V pinget tõsta elektroonika puhul 5 V-ni ja mootoritel 6-9 V-ni. Tundub, et sellise akukoostu võimsust saab uute elementide lisamisega hõlpsasti varieerida, kuid ärge unustage, et kasutatavad akud peavad olema sarnase mahutavuse ja sisetakistusega.
Jada- või paralleelakude laadimiseks/tühjenemiseks on olemas spetsiaalsed kontrolleriplaadid. Kaitsekontrollerid kaitsevad akukoostu liigse laadimise või tühjenemise (pinge juhtimine), lühise ja lubatud tühjendusvoolu ületamise eest. Selliste lihtsate plaatide kasutamisel on vaja laadimisvoolu piiramisega välist toiteallikat. Laadimis-/tühjenemiskontrollerid saavad akusid iseseisvalt laadida, kasutades cc/cv meetodit piiratud laadimisvooluga. Täiustatud kontrollerid akude jadaühenduseks võivad pakkuda ka iga aku jaoks individuaalset laadimist – need tasakaalustavad akuelemente.
Valisin aku jadaühenduse skeemi, kasutades kaitseplaati ja välist laadijat. Tulevikus saab sellise lihtsa juhtplaadi asendada tasakaalustamisega laadimiskontrolleriga. Kuigi paralleelühenduse puhul pole balansseerimine vajalik, tuleb arvestada, et kui üks aku on tugevalt kulunud, siis kontroller seda tuvastada ei suuda ja see võib olla millegagi täis. Samuti tasub arvestada asjaolu, et iga aku töörežiimid on erinevad. Näiteks sama võimsuse ammutamisel peavad paralleelühendusega akud tootma rohkem voolu kui paralleelühendusega.
Seetõttu sobivad mootorid nimipingega 6 V ja töövahemikuga 3-9 V Valisin mootori, mille pöörete arv on 281 p/min ja tühikäigul kulub 80 mA. Koormuse all langeb kiirus 238 p/min, vool tõuseb 380 mA-ni, samas kui mootor toodab võimsust 2 W ja arendab pöördemomenti 0,5 kg*cm. Kui mootor on seisatud, suureneb pöördemoment 4 kg*cm-ni ja vool 900 mA-ni. Kõik need omadused võeti ühe toote müüja veebisaidile postitatud plaadilt, kuna ma ei leidnud tavalist "andmelehte".
Korpuse ja šassii kokkupanek
Tellisin järgmised mootorid.
Kui vaadata fotot, on näha mootoritest väljaulatuvad võllide lahased. Nende mootorite jaoks leiti haakeseadiste ja rataste komplekt.

Veljed läbimõõduga 80 mm, pehmed naastrehvid.


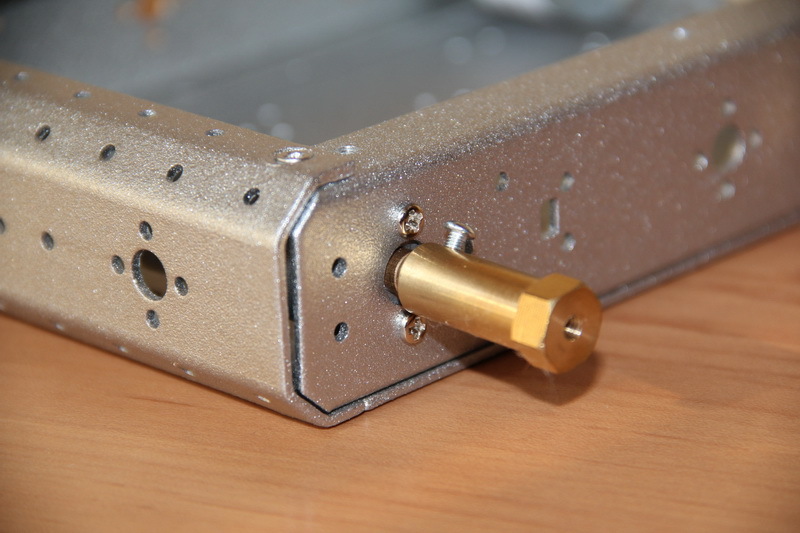
Aluse ise kavatsesin teha laiadest alumiiniumnurkadest (või millestki sarnasest, mida ehituspoodidest leiab), mille abil teeks “külje” raami, mis oleks kaetud mõne kerge, vastupidava metallplaadiga. Õigetesse kohtadesse puuritakse augud ja lõigatakse niidid vastavalt vajadusele. Siiski otsustasin kõigepealt uurida, mida Hiina tööstus pakub. Ja leidsin komplekti - šassii komplekt roboti konstrueerimiseks, mis sisaldas kere ennast, eelmainitud mootoreid, ühendusi ja rattaid, samuti patareipesa AA patareide jaoks, toitelülitit, pistikupesa ja kinnitusi. Korpusel endal on palju auke, mis muudab selle loogiliselt kergemaks ja nende olemasolu peaks santehniliste tööde mahu minimeerima.


Olles hinnanud siseruumi suurust ja mahtu (samal ajal valiti platvormile elektroonika, mis pidi sellesse korpusesse mahtuma), tellisin selle komplekti. Saabunud mootoritel, nagu ülalt näha, on millegipärast kirjas JGA25-370-9v-281rpm. Ma ei saa aru, miks täpselt 9v, kui selle alarühma nimiväärtus on 6 V, kuid ilmselt teavad hiinlased paremini, mida kirjutada, et see paremini müüks.
Korpus ise kaalub ligi 400 grammi. Raske on vastata, mis materjalist see on valmistatud, kuid see ei näe välja nagu puhas alumiinium.




Eemaldage kate ja paigaldage mootorid. Mootorite augud on läbimõõduga ainult M3 kruvide jaoks, asendi reguleerimiseks varu ei jää, kuid ausalt öeldes ei tekitanud see probleeme - augud langevad selgelt kokku mootori korpuse keermetega.



Paigaldame liitmikud.

Ja kinnita rattad.


Tulemuseks on valmis platvorm, mille kliirens on umbes 23 mm.

Tühikäigul töötava šassii kaal oli veidi üle kilogrammi. Kas mäletate pilte üksikute osade massi mõõtmistega? 393+(58+85+20)*4 = 1045 grammi. Kõik kokkupandud kaalub 1057 grammi. 12 grammi lisatud 16 polti.

Nii saigi, päris mõnus platvorm.

Elektriskeem
Siin tasub selgitada oluline punkt, miks just see vaal. Fakt on see, et kui teeme korpuse ise, saab selle sisemise mahu meelevaldseks muuta. Ostetud ümbris annab meile rangelt fikseeritud mahu, kuhu kõik peab ära mahtuma. Ideaalis jääb ka reserv alles. Sellega tuleb esialgu arvestada ja aru saada: kas vajalik täidis sobib sellesse konkreetsesse korpusesse või mitte ning kas on vaja kas vahetada elektroonikat või valida mõni muu korpus. Korpuse sisse paigaldatakse: mootorid, aku, mootorite draiver, toiteplaat, millele tuleb ka mingi elektroonika - samad pingemuundurid.Näib, et on selge, mis meil täpselt sees on. Aga kuidas see kõik ühendab? Kui sul on idee, aga sa ei suuda sellest pilti luua, siis sul pole ideed. Elektroonikas selgub, et peaks olema kaks pilti - visuaalne, mida me juba täielikult ette kujutame, ja elektriline (tegelikult on olemas ka algoritmiline - kui kirjeldatakse seadme käitumist, mille määrab selle riist- ja/või tarkvara (püsivara funktsionaalsus) võimalused).
Veedan üsna palju aega tööle sõites. Üldiselt võib öelda, et õige lähenemise korral saab pika teekonna plussiks muuta raamatute lugemine, populaarteaduslike saadete või audioraamatute vaatamine/kuulamine, mida te kunagi ei loeks, kuulaks ega vaataks. Just tänu nendele tingimustele sai minust fänn ja kuulasin kõik kokkupanemise mudeli lood (nii et kommentaarides ei tekkinud küsimusi -). Robotihoorus polnud erand ja ma mõtlesin välja platvormi põhiskeemi ja joonistasin selle tahvelarvutis teele.
Diagramm on joonistatud OneNote'is. Pilt on klikitav. Jah, mul on häbi – vooluahela skeem näeb välja põhimõttetu. Viimased kolm nädalat pole ma saanud artikli lihvimisele aega pühendada ja juba tekkis küsimus: kas ma peaksin üldse midagi avaldama või lükkama selle "hiljemaks". Otsustasin selle sel viisil avaldada, vastasel juhul võib "hiljem" olla tülikas. Joonistan tavalised skeemid ja asendan pildid. Teisest küljest näeb see disain välja nagu originaalne isetegemine. Tööl või kodus, kui idee tekib, võta esmalt tavaline paberileht ja tavaline pliiats...
Vaatame skemaatiliselt, millega ja millega ühenduse loome. Liitium-ioonaku kontrolleriga D1 on ühendatud kolm 18650 akut. Kogu vooluringil on "ühine maandus", millele on ühendatud P-kontrolleri D1 väljund. Väljund P+ on kaitsme FU1 ja lüliti SW kaudu ühendatud DC/DC muundurite D3 ja D4 sisenditega. Konverter D3 genereerib pinget mootoritele, D4 – kogu elektroonika toiteks. Nende muundurite väljundid on ühendatud mootori draiveriga D5, mille külge on ühendatud mootorid. Vasaku poole mootorid ML1, ML2 on ühendatud MA kanaliga ning parema poole mootorid MR1, MR2 MB kanaliga. Juht on kahe kanaliga, mis tähendab, et saab juhtida kahte mootorirühma (kanalid A ja B), kuid mitte iga mootorit eraldi. Mootorite kiiruse ja pöörlemissuuna juhtimiseks kasutatakse porte ENA, ENB, IN1-IN4. Takistusahel, mis genereerib pinget Vbat’, valitakse nii, et moodustuks akuploki pinge Vbat telemeetria vahemikus 0...5 V. Kui Vbat = 13 V (mis ei tohiks nii olla, kuna akuplokk suudab toota maksimaalselt 12,6 V, aga ma mängisin seda ohutult), siis Vbat' = 3,94 V (see tähendab, et väärtus ei lähe kindlasti üle 5 V piiri). Takistusahelat läbiv vool 12 V juures võrdub 3,6 mA-ga ja ma pidasin neid kadusid vastuvõetavaks (umbes 0,1% aku mahutavusega 3000 mAh). Kontrolleri sisendiga D1 on ühendatud välise toiteallika pistikupesa. Kuid diagrammil näeme, et see on ühendatud relee D2 kaudu.
Esiteks tahan selgitada 10 kOhm takisti olemasolu, mis tõmbab ühe toitepistiku tihvti pingele 5 V. Meil on kolme väljundiga toitepistik. Väljundite paar edastavad toiteallika pinget. Kolmas väljund on informatiivne. See on suletud negatiivse väljundiga (meil on see maandusega ühendatud), kui pistikupesas pole pistikut ja avaneb, kui pistik on pistikupessa sisestatud. Seega saame toiteallika ühendamise kohta telemeetria signaali Vinon’: kui pinge Vinon’ = 0, siis ei ole välist toidet ühendatud, kui Vinon’ = 5 V, siis on ühendatud. 10 kOhm takisti tõmbab selle väljundi pingele 5 V. Pistiku ühendamisel läbib takistit 0,5 mA vool, mis on üsna vastuvõetav.
Kui väline allikas on ühendatud tavaliselt suletud relee D2 ja kaitsme FU1 kaudu, hakkavad akud laadima. Tavaliselt suletud relee tähendab, et selle väljundid on alati suletud ja avatud ainult siis, kui juhtkontaktile rakendatakse pinget. Miks relee D2? Oletame, et meil pole seda releed. Kui toiteplokk on platvormiga ühendatud, kuid unustate selle pistikupessa ühendada, siis kuidas saab mikrokontrolleri plaat teada, kas aku laeb või mitte? Mis siis, kui toiteallikas on pistikupessa ühendatud, kuid pinget ei väljasta? Või kõik töötab, aga toide toodab vajaliku 12V asemel ainult 10V? Ja kui ma ühendan sellise allika (mis toodab ainult 10 V) akuga, mis ei ole veel täielikult tühjenenud ja toodab 11 V, siis kust ma tean, et need 11 V tekib akuplokist (mis tegelikult ei anna välja kõrgem kui 10 V) või välist allikat? Selliste olukordade jaoks mõeldi välja algoritm, mille jaoks oli vaja releed. Õpime välise toiteallika ühendamise kohta Vinoni telemeetriast. Lülitame relee välja ja vaatame Vini telemeetriat. Kui teile sobib ja see pinge on oodatud vahemikus, siis lülitame relee sisse ja anname laadimisprotsessist märku. Kui te pole rahul, ei lülita me releed sisse ja anname tõrkest märku. Laske analüüsi- ja kuvamisprotsessi, mitte platvormil, hallata pardajuhtpaneelil. Selleks edastame sellele kõik vajalikud pinged ja Vinoffi relee juhtsignaali. Releemooduli juhtsisend tõmmatakse kuni 5 V-ni läbi 10 kOhm takisti, tagades relee pideva sisselülitamise. Kui sellele sisendile rakendatakse 0 V, lülitub relee välja.
Aga miks täpselt veevee-eelne mehaaniline relee? Lõppude lõpuks saate installida MOSFET-transistori. Selline idee oli, aga pidin sellest loobuma. Kaasaegsed MOS-transistorid on avatud olekus väikese takistusega (kümned millioomid) ja voolu 2–5 A korral ei toimu väga olulist pingelangust ja selle tulemusena kuumenemist - transistori korpus ise võib väike võimsus isegi ilma radiaatorita. Kuid see kõik puudutab vooluringi, milles selline digitaalne võti juhib toiteallika ühendamist passiivse koormusega. Asetame transistori kahe allika vahele, mille tagajärjel võib äravoolu ja allika pingeerinevus olla märkimisväärne, mis toob kaasa suurenenud soojuse tekke ja transistor läheb väga kuumaks. Samuti tuleb transistori avamiseks või sulgemiseks teha juhtlülitus (draiver), kuna juhtpinge tase mikrokontrolleri plaadilt on 5 V, millest ei piisa transistori juhtimiseks paisuallika pingeerinevuse tekitamiseks. (transistori juhtimiseks, näiteks IRFZ44N, peame selle avamiseks panema selle väravale 8-12 V). Nii või teisiti - valmis releemoodul, mis tuleb lihtsalt ühendada ja mis suletuna ühendab garanteeritult väljundi ilma probleemideta sisendiga.
Seega saime mitte ainult lülituskilbi, vaid täisväärtusliku toiteplaadi. Plaadil on alalis-alalisvoolu muundurid, takistuslikud vooluringid, kaitse ja hunnik konnektoreid elektroonika ühendamiseks. Struktuuriliselt saab eristada kahte pistikut. Ühendus CON1, millega ühendatakse akupakett, toitelüliti/nupp, toitepistik, releemoodul, mootorid, mootori draiveri plaat – kõik platvormi sees olevad välisseadmed. Ja pistik CON2, mille eesmärk on ühendada juhtplaadiga. Sellesse konnektorisse väljastatakse telemeetria- ja juhtsignaalid, pinge 5 V, samuti on kasulik Vbat akupakist pinget “pumbata” - anname võimaluse “kõrgemal tasemel” korraldada oma toitekanaleid erinevatega. pinged, näiteks 6 V servodele.
Šassii elektroonika
Elektroonika valiti paralleelselt seadme elektriskeemi väljatöötamisega.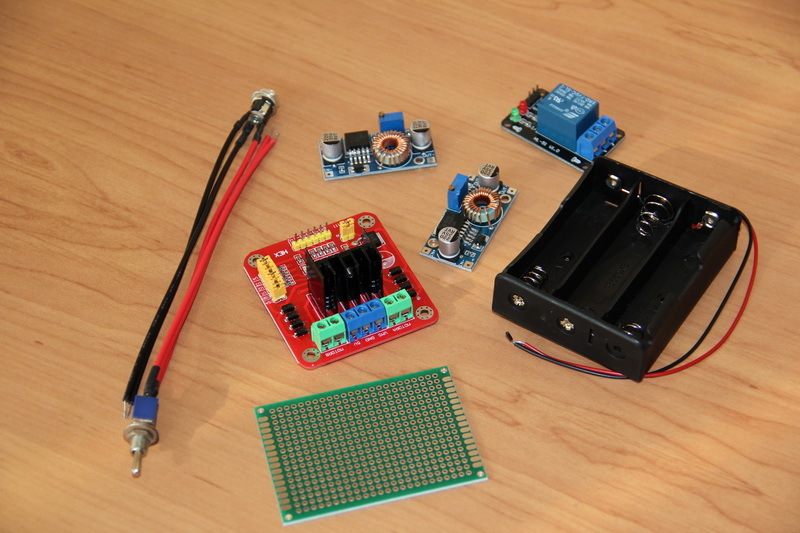
Pistikupesa ja lüliti kasutati saadud šassii komplektist. Valiti välja ja osteti L298N kiibil põhinev draiver mootoritele, XL4005 DC/DC konverterplaadid, nimetu releemoodul, akupesa ja trükkplaat mõõtmetega 50x70 mm ja augu samm 2,54 mm.
Lisaks sellele vajame ka järgmisi materjale.

Foto ülaosas on näha mitu pikka tihvti pistikut sammuga 2,54 mm, samuti pistikupesad, allpool on metallist kontaktid kaabli jaoks, vasakul on nende pistikupesad, paremal kruvid, mutrid ja M2 seibid. Plaadi ja kaabli pistikuid kutsutakse erinevates kauplustes erinevalt. Ajaloolistel põhjustel nimetan plaadi pin-pistikuid PLS-iks, plaadi pistikupesi PBS-iks ja kaabli pistikuid BLS-iks. Internetis, välismaistel saitidel otsitakse selliseid pistikuid tüübiga “2,54 mm pistik” või “dupont pistik”. Lisaks vajate erinevaid tarbekaubad- joote, räbusti, juhtmed jne, samuti komplekt Käsitööriistad- traadilõikurid, pintsetid, kruvikeerajad jne - neil, kes vähemalt kuidagi isetegemist (Do It Yourself - tee ise) teevad, on see kõik tavaliselt olemas.
Enne elektroonika ja korpuse tellimist arvasin, et valitud elektroonika peaks probleemideta siseruumi ära mahtuma. Kätte on jõudnud aeg seda kontrollida: korrastame elektroonika ja märgime tulevased asukohad.


Nüüd alustame plaatide ettevalmistamist.
Alustasin akupaketiga. Liitium-ioonaku kontroller oli "paigaldatud" kuumsulavale liimile ja kontakttihvtid joodeti selle külge vastavalt elektriskeem. Arvan, et lugejaid huvitab, mida ja millise tööriistaga tehti, seega postitasin artikli lõppu spoileri alla pildid mõnest kasutatud seadmest koos oma lühikeste kommentaaridega. Kuumliim kanti peale kuumsulatuspüstoli abil. Enne seda aga tuli teha tööd, et nii-öelda selle kambri töökindlust parandada. Hoiatan kõiki, kes plaanivad midagi ette võtta - parem mitte teha oma viga ja võtta vastupidavamad akupesad. Kunagi ma jaemüügist selliseid sektsioone ei leidnud ja kui need leidsin, kogusin neid rõõmust ja südamelihtsusest palju. Kuid nendega pole kõik nii lihtne. Sest selles lahtris lamedate, mitte väljaulatuvate positiivsete padjadega akud lihtsalt kontaktini ei ulatu. Lisaks pöörlevad kõik vedruga kontaktid, kontakt on kehv. Seetõttu pidin M2 poldid sisse keerama, üleliigse maha hammustama, mutrid peale keerama ja kontakti parandamiseks pingutama. Kuid see ei tundunud mulle piisav ja ma jootsin ka kõik ühendused põhjalikult. Sest kui midagi tehakse, siis peab see olema töökindel, et see ei tekitaks edaspidi probleeme ega tuleks selle juurde enam tagasi.
Tuleb märkida, et liitium-ioonakude puhul kasutatakse tavalist ilma tasakaalustamata kontrollerit. See tähendab, et kui üks kolmest akust on laetud, katkestab kontroller tõenäoliselt kõigi akude laadimise. Tegelikult on see lihtsalt kaitseplaat akude vähese tühjenemise ja ülelaadimise eest ning tühjendusvoolu juhtimine. Seetõttu on soovitatav kasutada sama tegeliku võimsusega akusid. Kui kasutada tasakaalustamisega kontrollerit, siis on võimsuse valik vähem kriitiline ja akud kuluvad tõhusamalt, kuid sellised kontrollerid on kallimad ja võtavad rohkem ruumi. Kuidas valida sama tegeliku võimsusega akusid? On ju ostes identsed akud samast seeriast, isegi brändidelt, mahutavus võib erineda 5-10% ja Hiina akud, millel on silt 6000-8000 mAh, on üldiselt teadmata mahuga akud. Reaalsete võimsuste mõõtmiseks kasutasin OPUS BT-C3100 laadijat, mis on minu keskkonnas üsna populaarne. Selle abil kontrolliti 12 ostetud akut ja valiti välja kolm, mille võimsuste vahemik oli minimaalne ega ületanud paari protsenti. LG LGABC21865 akude mahutavuseks märgiti 2800 mAh, kuid tegelikkuses kõikus see vahemikus 2400-2500 mAh (testitud 700 mA vooluga).
Lühike kõrvalepõige mõtiskluse vormis. Laadija arvutas meile aku võimsuse, võttes arvesse nende laadimist kuni 4,2 V ja tühjenemist, kui ma ei eksi OPUS BT-C3100-ga, kuni 2,8 V. Meie akud ei tohiks tühjeneda vähem kui nimiväärtus 3,5- 3,7 V See tähendab, et meie tööaku võimsus on mõõdetust palju väiksem. Seda tuleb arvestada. Võib-olla tasub tulevikus kaaluda neljast akust koosnevat akut. Kas laadimiseks on võimalik lihtsalt akupakett ja toiteplokk välja vahetada? Selgitame välja. Saame pingevahemiku 14,4-16,8 V. Pingemuundurid töötavad sisendpingega kuni 32 V. Takistusjagurid annavad meile telemeetriasignaalide pingevahemiku 4,3-5,1 V, mis on veidi üle 0- ülemise vahemiku. 5 K. Selle vastu saab aga juhtplaadi tasemel – kui telemeetria pinge on 5 V, siis on akupakk mõne aja pärast peaaegu laetud. Teisest küljest, kui alandate mootorite pinget 6-7 V-ni, saate olemasoleva akupaki tugevamalt tühjendada ja akusid tõhusamalt kasutada - sellisel juhul on vaja reguleerida ainult ühte pingemuundurit. Esmapilgul on ruumi edaspidiseks uurimiseks ilma riistvara üldse muutmata ja kuidas täpselt tõlgendada telemeetria signaale sõltuvalt paigaldatud akust – olgu see otsustatud juhtpaneeli tasemel, see tähendab, et praegu ei saa te seda teha. ei pea sellele mõtlema.
Eemaldasin saadud aku väljundjuhtmed spetsiaalsete tangidega (stripper) ja surusin need presstangide (crimper) abil metallkontaktidesse, jootsin need töökindluse tagamiseks ja panin neile plastikust korpused, saades BLS-pistikud. Kasutatakse jootmiseks Jootejaam, jootena – POS-61 ilma kampolita, räbustina – mittepuhastav FluxPlus NC-D500.



Pärast akukomplekti kokkupanemist ja sellesse akude paigaldamist ei väljasta see midagi. Nii on konstrueeritud palju liitiumioonaku kontrollereid – need vabastavad koormuse lühise, tugeva tühjenemise või liigse tühjenemisvoolu korral. Kaitse "lähtestamiseks" ja aku tööseisundisse viimiseks tuleb +P/-P kontaktidele rakendada 12-12,6 V pinget. Sama tuleb teha ka pärast patareide esmakordset ühendamist kontrolleriga. Pärast seda saate kontrollida, kas seade toodab pinget, kui patareid on kontrolleriga õigesti ühendatud.
Selliste akukomplektide laadimiseks on toiteallikad väljundpingega 12,6 V (3x4,2 V). Sellise toiteallikaga kasutatakse akusid tõhusamalt, kuigi saab kasutada ka 12 V toiteallikaid, mul on juba selline toiteallikas väljundiga 12,6 V ja voolutugevus 5 A. Kui sarnane allikas on. ostetud, siis tasub kontrollida, kas see vastab deklareeritud omadustele. Lihtsaim test on kontrollida kandevõimet. Selleks kasutasin keraamilisi takisteid nimiväärtusega 1 Ohm 10 W ja 4,7 Ohm 10 W. Olles sellistest takistitest kokku pannud 2,5-oomise takistusega koostu, ühendasin sellega toiteallika ja mõõtsin selle väljundis pinget. Arvutatud vooluga 12,6/2,5 = 5 A tootis minu toiteallikas 12,6 V - see on suurepärane tulemus. Hiina toiteallikad, mis ütlevad umbes 12V3A, hakkavad sageli 10–20% vajuma, kui koormus on vaid umbes 1 A.


Analoogia põhjal valmistati ette lüliti ja pistikupesa.

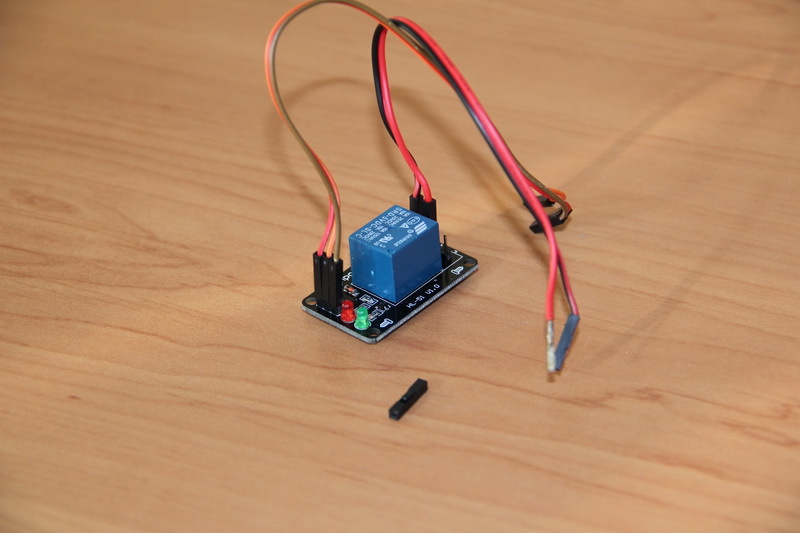
Fööni abil eemaldati releemoodulilt klemmiplokk ja joodeti PLS-kontaktid. Selle mooduli ühendamiseks toiteplaadiga tegin juhtmed - eemaldasin, krimpsutasin ja jootsin toitejuhtmed (mille kaudu ühendatakse toitepistik ja akuplokk) ristlõikega 18-20 AWG. Ja juhtimiseks kasutasin enda käsutuses olevaid peenemate südamike juhtmeid, mida saab hõlpsasti otsida nimega “Dupont”.

Sama tehti ka mootorijuhiga.


"Jalad" joodeti DC/DC muunduritele. Tasub mainida, et need kontaktid on valmistatud metallist, mida saab hästi jootma ainult aktiivvooga. Seejärel kasutan FluxPlusi asemel LTI-120, millele järgneb jootmiskohtade pühkimine isopropanooliga niisutatud lapiga, et eemaldada räbustijäägid.

Nüüd valmistame oma tahvli elektroonikaga. Alustuseks on hea mõte üldiselt ette kujutada, kuidas ja mida tahvlil ühendatakse. See tähendab, et proovige joonistada trükkplaati.
[Toiteplaat]

Arvake ära, kust ma selle tahvli välja mõtlesin ja “lakkusin”? Näeme plaadil kahte pistikut, kahte pingemuundurit. Ilmunud on täiendav hüppaja (eemaldatav hüppaja), mille saab paigaldada, jättes kaitsme elektriahelast välja - tegin seda spetsiaalselt kaitsme banaalse puudumise tõttu plaadi valmistamise ajal.
Plaadi ühendamine on üsna tüütu ja vaevarikas töö. Toiteallikaks kasutasin juhtmeid ristlõikega 18-20 AWG, muude signaalide jaoks - 26-30 AWG. Miks just leivalaud ja juhtmestikuga vaev? Sest meil on alles esimene prototüüp. Midagi võib muutuda, nii et juhtmestiku uuesti jootmine on lihtsam kui rööbaste lõikamine ja kõikvõimalike džemprite jootmine valmis trükkplaadile. Trükkplaadi valmistamine võtab aega - küljendamine, maski tegemine, söövitamine, puurimine, tinatamine, lahtijootmine - on ebatõenäoline, et see võtab vähem aega kui "juhtmestikuga" plaadi valmistamine. Kuigi trükkplaat See on usaldusväärsem ja näeb professionaalsem välja.
Samadel põhjustel ei joodeta DC/DC-muunduri mooduleid plaadile, vaid tehakse ideaaljuhul eemaldatavate moodulitena, pärast esialgset silumist tuleb need täiendavalt kinnitada konnektori külge, näiteks tilgutades kuuma liimi. Kõigi pistikute ühenduste usaldusväärsuse suurendamiseks on hea mõte kasutada sama meetodit. Kuid kui meil on prototüüp, on meil mugavam muuta kõik eemaldatavaks, et edaspidisel silumisel oleks vaba juurdepääs mis tahes olulisele komponendile ja vajadusel oleks lihtsam seda asendada.




Pärast plaadi valmistamist on vaja kontrollida, mis on saadud vooluahela ja juhtmestiku skeemidele vastavuse kohta. Multimeetri abil kontrollin sisendeid ja väljundeid lühiste suhtes (parem on mitte kontaktidele “helistada”, vaid mõõta nende takistust, kuna näiteks vale valmistamise või projekteerimise korral võib takistus olla saja oomine vorm sisendis, mis ei pruugi "heliseda", kuid selle olemasolu põhjustab vooluringis tõrkeid ja võib põhjustada suuri probleeme), samuti veendun, et kõik oleks plaadi sees vastavalt vajadusele ühendatud.
Pärast kontrollimist enne kokkupanekut peaksite veenduma, et plaat töötab normaalselt, kui kõik välisseadmed on ühendatud. Selleks peate esmalt ühendama aku, toitelüliti ja keerake lüliti ümber. Pingemuundurite LED-tuled peaksid põlema ja midagi ei tohiks läbi põleda. Kui midagi pole ühendatud, on vaja reguleerida muundurite väljundpinget. Seejärel lülitatakse toide välja, releemoodul ühendatakse ja toide lülitatakse uuesti sisse. Nii on kõik välisseadmed samm-sammult ühendatud ja kontrolli all.
Platvormi elektroonika paigaldus ja ühendamine
Elektroonika on valmis. Nüüd peate selle installima. Mäletate, elektrooniliste tahvlite istmed olid märgistatud? Akukruvikeerajaga puuritakse vajalikesse kohtadesse augud. Seejärel lihvitakse neid lihvimistarvikuga minitrelliga. M2 kruvid keeratakse aukudesse. Seibid tuleb asetada kruvide ja mutrite alla. Lisaks keerasin peale ka teise mutri - lukustusmutter tagab töökindlama keermestatud ühendus ja vähendab selle lahtikeeramise tõenäosust. Valmistame masinat.
Märgin, et kahe kõrvuti asetseva mootori vaheline kaugus on üsna suur. See on oluline punkt, millele tuleb tähelepanu pöörata järgmisel põhjusel. Fakt on see, et valitud mootorid on ilma tagasisideta. Me lihtsalt rakendame neile teatud pingetaseme ja nad pöörlevad teatud kiirusega. Kuid mootori omadused võivad erineda, mis põhjustab kindlasti probleeme sirge liigutusega. Kui mootorite levik on väike ja robotit hakkab juhtima ainult operaator, kes saab alati liikumist korrigeerida, siis ei pruugi see olla oluline probleem. Kui aga levi on märkimisväärne või robot peab automaatrežiimis läbima pika vahemaa “sirgelt”, siis on vaja tagasisidet anda. Seal on seeria GM25-370 mootoreid, mis on disainilt identsed, millele on juba paigaldatud Halli andurid. Mis see on? Mootori tagaküljele, piklikule võllile, on kinnitatud ketas, millele on asetatud magnet, mis mõjutab Halli andurit. Pärast iga ketta täispööret saame impulsisignaali, mille töötlemisel saame määrata pöörete arvu minutis. Seega on meie platvormil üsna tõsine vundament tulevikuks: võimalik on paigaldada tagasisidega mootoreid, ühendada need toiteplaadiga, mis toidab nendel olevaid andureid ning edastada telemeetriasignaale juhtpaneelile – juhtimissüsteem saab automaatselt võrdsustada mootorite kiirust.


Jootsin juhtmed mootorite külge vastavalt nendel olevatele märkidele - igal mootoril oli kahest kontaktist ühe lähedal punane täpp. Pärast mootorite kättesaamist kontrollisin neid, kuid ei pööranud tähelepanu selle märgistuse õigsusele. Üks mootor, muide, saabus defektiga ja ei pöördunud üldse, müüja saatis mulle lahkelt asendus, mille jõudmiseks kulus vähemalt kuu. Seejärel selgus, et ühe mootori märgised olid segamini, kuid see pole probleem - lihtsalt muutke selle mootori toiteplaadiga ühendamise polaarsust. Tulevikku vaadates ütlen, et sama olukord juhtus ka "külgede" ühendamisega - "edasi" käsu andmisel pöörlesid tüürpoordi rattad ettepoole ja vasakul küljel tagasi. Seda saab parandada ka polaarsuse muutmisega soovitud mootori draiveri kanali ühendamisel toiteplaadiga. Ühenduse polaarsuse muutmine - pole vaja midagi jootma ega ümber teha, peate lihtsalt juhtmeid vahetama.
Elektroonikaplaatide ja korpuse vahelise elektrikontakti välistamiseks lõikasin mullpakendist platvormi põhjale plastplaadid.

Paigaldage aku. Plast on väga pehme ja sõna otseses mõttes vajub kruvipea alla isegi seibist, nii et ma pidin kasutama pikka metallplaat.


Kõik meie poldid ja mutrid alumisel küljel on kliirensit veidi vähendanud ja näevad välja üsna esteetiliselt meeldivad.


Isoleerime põhja, kuhu on paigaldatud elektroonikaplaadid. Samuti lõikasime välja ja asetame akupaki metallplaadile plastikriba, et isegi aku korpus ei kriimustaks kruvipea peale, liitium on tõsine!


Paigaldame ja kruvime elektroonikaplaadid ja toitepistiku.






See on õudusunenägu, kui palju juhtmeid... Ühendame välisseadmed toiteplaadiga.


Platvormi juhtelektroonika
Nagu aru saate, on ülesanne põhimõtteliselt täidetud. Platvorm sai kätte, kõik sujus üsna edukalt. Platvormi juhtimiseks saate kasutada mis tahes mikrokontrollerit, FPGA-d, Arduino plaate, Intel Galileot jne.Valisin Arduino Nano plaadi, leidsin odava ja mugava laiendusplaadi välisseadmete ühendamiseks ja bluetooth mooduli selle jaoks. Põhiidee on juhtida meie platvormi nutitelefonist Bluetoothi kaudu. Väliste seadmete ühendamiseks mõeldud kontaktide rohkusega laiendusplaat võimaldab tulevikus sujuvalt ühendada tulevaste robotite välisseadmeid.


Nüüd peame selle elektroonika jaoks kavandama ja valmistama trükkplaadi. Teeme “võileiva”: trükkplaadi, millele on paigaldatud bluetooth moodul ja laiendusplaat, millesse omakorda paigaldatakse mikrokontrolleriga plaat.

Võrreldes toiteplaadiga on see plaat peaaegu puhtalt lülitusplaat. Keskel on kaabel ühendatud 18-kontaktilise kolmerealise pistikuga, mis ühendab selle juhtplaadi toiteplaadiga. Sellest pistikust suunatakse signaalid laiendusplaadi vajalikele kontaktidele, mis seejärel lähevad mikrokontrolleri vajalikele eelvalitud kontaktidele. Samuti väljastatakse 5 V ja Vbat plaadi eraldi kontaktidele. Plaadil on toide bluetooth moodulile, selle Rx/Tx sisendid on laiendusplaadi kaudu ühendatud Arduino Nano plaadi Rx/Tx sisenditega. Tahvel sisaldab eemaldatavat bipolaarset LED-i, mille eesmärk on näidata kõiki vooluga seotud protsesse. LED võib genereerida rohelist ja punast pidevat helendust, vilguda etteantud sagedusega - sellest peaks piisama, et näidata aku normaalset pinget, selle tühjenemist, näidata laadimisprotsessi ja näidata ühendatud toiteallika seisundit.
Et mitte segadusse sattuda, mida kuhu tuleb ühendada, joonistasin skemaatiliselt Arduino Nano tahvli ja jagasin selle jaoks signaalid laiali.

Rx/Tx-pordid on hõivatud Bluetooth-mooduliga, mis töötab UART-protokolli kasutades. Võimalusel ühendatakse IN1-IN4 signaalid digitaalportidesse - nende signaalide polaarsus määrab mootorite pöörlemissuuna ja ENA/ENB nendesse portidesse, mis võimaldavad PWM-signaale väljastada - need signaalid määravad pöörlemiskiiruse mootoritest. Platvormi telemeetria signaali väärtused digiteeritakse Arduino Nano plaadi analoogsisenditega A0-A3. LED hõivab pordid A4 ja A5 ning see on ühendatud džemprite kaudu. Fakt on see, et neid kahte porti on vaja I2C-protokolli lihtsaks korraldamiseks ja kui me seda vajame, saame džemprid lihtsalt eemaldada. LED-i saab “visata” teistesse vabadesse portidesse või ühendada vabade portidega A4 ja A5 pordilaiendusmooduli abil (näiteks PCF8574T kiibi baasil – see annab lisaks kaheksa digitaalset sisend/väljundporti, moodul on juhitakse I2C protokolli kaudu), mille paari kontaktidega ja ühendage LED. Selle ühenduste jaotuse tulemusena säilib võimalus ühendada sujuvalt SPI-seadmeid, digitaliseerida veel kaks analoogsignaali ja väljastada kuni neli PWM-signaali (näiteks servo juhtimiseks). Üldiselt sooviksin rohkem tasuta signaale, kuid nende arvu saab PCF8574T abil suurendada. Lõpuks saate kasutada mõnda teist Arduino Nanot või asendada see vajalike ülesannete jaoks sobivama platvormiga - see lahendus annab täielikult teatud miinimumi.
Meie plaat võimaldab ka hõlpsat vooluvõrku ühendada: seal on kontaktid 5 V toite ja aku pinge jaoks (kuni 12,6 V).
Märkimist väärib üks nüanss Arduino Nano jaoks kasutatud laiendusplaadist. Põhimõtteliselt võimaldab laiendusplaat sellel Vbati käivitada. Laiendusplaadile on paigaldatud pingemuundur, mis alandab sisendpinge 5 V-ni ja annab selle Arduino Nano plaadile, mille muundur langetab selle 3,3 V-ni ning see pinge eemaldatakse Arduino Nano plaadilt ja jaotatakse laiendusplaadi vastavad kontaktid. Seda ma aga ei teinud ja ühendasin 5 V laiendusplaadi vastava kontaktiga. Lisaks ei süttinud laiendusplaadi juht-LED üldse, kui Arduino Nano plaati polnud paigaldatud, ehk see ilma Arduino Nanota laiendusplaat ilmselt tegelikult ei tööta. Ma ei uurinud põhjuseid, kuid panin selle punkti tähele.
Me teeme seda juhtpaneeli.



Paigaldame sellele elektroonilised tahvlid.



Valmistame ette kohad oma juhatusele. Samal ajal paigaldame lüliti.


Ja me kogume kõike.


Nüüd peate kahe plaadi ühendamiseks tegema kaabli. Töökindluse tagamiseks jootme ka toitepistikud. Kontrollime kõike õigesti ja väga hoolikalt. 12 V peaks tulema 12 V peale ja 5 V peaks tulema 5 V. Toite- ja juhtlülitusplaatide piltidel on “pealtvaade”, st kui plaadid ümber pöörata, siis alumisel, jooteküljel. plaadid, kontaktid vahetatakse - seda tuleb kaabli valmistamisel ja vastavate juhtmete läbimisel arvestada. Pistikud tegin lihtsalt: esiteks monteerisin BLS-pistikutega juhtmeid kokku ja mässisin need kaks korda teibiga kokku. Seejärel koondati kõik kaks/kolm rida kokku ja mähiti uuesti tihedalt teibiga kinni. Tulemuseks oli terviklik ja monoliitne pistik. Plastikust BLS-pistikud ilma kontaktideta asetati lihtsalt kasutamata pistikutihvtidesse.
Pärast kaabli valmistamist eemaldatakse juhtplaadilt kõik elektroonikaplaadid ja seda kontrollitakse multimeetriga samamoodi nagu toiteplaati. Ühendame juhtplaadi toiteplaadiga ja anname toiteallika. Kontrollime multimeetri abil hoolikalt kõigi moodulite toitekontakte, uurime telemeetria signaalide pingeid - veel kord veendume, et kõik on õigesti ühendatud. Sa ei pea seda tegema, pane kõik enesekindlalt kokku, pane voolu peale ja avasta, et mingil müstilisel moel on 5 V ja Vbat juhtmed segamini ning meie Arduino plaat ja bluetooth moodul on läbi põlenud. Kuid parem on mitte korrata teiste inimeste vigu.
Fotol on näha, et üks punane toitejuhe on hõbedaseks toonitud. See on pinge Vbat edastava juhi tähistus. Seadme kokkupanemisel on kasulik teha ühendamiseks “võtmed”. Näiteks ärge jootke tahtlikult ühte PLS-kontakti pistikule, vaid rikkuge kaablis olevat pesa või ummistage see isolatsioonitükiga - sel juhul rakendatakse "lollikindlust", kuna siis saab sellist kaablit paigaldada ainult täpselt tahvli vastavale pistikule lihtsalt sellepärast, et see muidu ei installi (meetod ei anna 100% garantiid - Internet on täis pilte, kus eriti visad inimesed suudavad sellisest kaitsest kuidagi mööda hiilida, kasutades selleks kadestamisväärset püsivust ja oma märkimisväärset tugevust ). Tavaliselt toonin konnektoritel vastavad tihvtid. Kasulik oleks DC/DC muundurite sisendpistikud märgistada toiteplaadile ja plaadil vastavad pistikupesad toonida. See hoiab ära konverterite vale paigaldamise ning mitme värvi kasutamisel ei lase 5 V ja 9 V pingel olevaid muunduriplaate omavahel segi ajada. See väike reegel aitab suuresti arendatava seadme sagedasel kokkupanemisel/lahtivõtmisel selle silumise ja testimise etapis.



Ühendame kaabli toiteplaadiga.
Tahaksin põgusalt naasta artikli alguse juurde, hetkeni, mil jagasime platvormi kaheks osaks ja võtsime juhtpaneeli “eraldi välja”. Tol ajal tundus see väga tasakaalustatud otsusena. Vaadates aga Arduino laiendusplaadi külluslikku kontaktivälja, saame aru, et tubli pooli nendest kontaktidest ei saa platvormi praeguse teostuse juures kasutada – hõivasime ligi poole Arduino plaadi sisend/väljundpistikutest. Ja mikrokontroller ise "töötab" mitte ainult programmi PWM-signaalide paari väljastamiseks mootoritele, vaid tagab täieliku kontrolli kogu platvormi sisemise ja välise toiteallika üle. Tasub mõelda - võib-olla tasub meie platvormi mootoriruumi lisada mikrokontroller? Bluetooth "antakse" "platvormipealsele" elektroonikale, mis juhib roboti seadmeid ja sellega mõeldakse välja liides. Saate korraldada UART-protokolli (see võtab kaks mikrokontrolleri kontakti), mille kaudu edastatakse andmepakett, mis sisaldab mootorite pöörlemissuunda ja kiirust ning platvormi üldist olekut... Ja teie tuleb konstruktsioon hoolikalt läbi mõelda, kuna meil pole mootoriruumis palju ruumi... Kuigi ... Kui te lahti keerate ja liigutate releed...
Noh, sellega mu pikk ja mõnikord igav lugu lõppeb. Ainult "riistvara" - platvormi riistvara - töötati välja, toodeti ja monteeriti. Töö järgmine osa on tarkvara. Kuid see ei tähenda, et peate tulevikus töötama ainult programmeerijana. Mikrokontrolleri püsivara loomise ja silumise protsessis peate mõnikord võtma multimeetri või isegi ostsilloskoobi ja välja selgitama, milline signaal tuleb, kus ja millises vormis. Tavaliselt ilmnevad „riistvara” projekteerimisetapi vead ja möödalaskmised suuremal määral just selle etapi alguses. Meie seade on väga lihtne, nii et kui midagi ei tööta, leitakse viga kiiresti. Kas te kujutate ette, mis tunne on töötada tõeliselt keerulised ahelad? Seal peate olema palju ettevaatlikum ja ettevaatlik. Samuti on vaja korraldada nutitelefoniga Bluetoothi kaudu juhtimisliides - välja mõelda mingi protokoll roboti ja telefoni vaheliseks teabevahetuseks. Ja arendada tarkvara, mis muudab roboti juhtimise mugavaks ja mugavaks. Kuid see kõik on teine, omaette lugu.
Kasutatud mõningaid tööriistu ja seadmeid
BOSCH liimipliiats. Liimipüstol. Boschi terminoloogias on see liimipulk. Suurepärane mobiililahendus. See töötab 18650 akuga, mis tähendab, et tulevikus pole asendamisega probleeme ja midagi muud ei saa katki minna. See kuumeneb kiiresti (15 sekundit) ja on pärast väljalülitamist kasutusvalmis, lakkab töötamast peaaegu kohe - liim ei voola sealt välja nagu teistes kuumsulatuspüstolites; Leitud rakendust igapäevaelus ja käsitöös. Ainus miinus on mitte nii levinud liimipulgad: 7 mm, kõrge temperatuur 150...170C (sobivad DREMEL GG01 ja GG03 pulgad).

BRUTO 17718. Isolatsiooni eemaldamise tööriist (eemaldaja). Täielik analoog kuulus mudel KBT WS-04A, mida paljud tootjad on müünud üks-ühes.

HT-202A. Tööriist ühenduskontaktidega juhtmete kokkupressimiseks (crimper).

Solomon SL-30. Usaldusväärne jootejaam. Jootekolvi toitepinge 24V. Nikkeldatud ots. Täpne temperatuuri reguleerimine.

SAIKE 8858. Aka Element 8032. Aka Yihua 8858. Aka ZHaoxin 858DH. Nende mudelite vahel on erinevusi, kuid disain, kütteseadmed ja elektroonika on samad. Hea, mugav, odav ja tõeliselt kompaktne jootepüstol. Ostsin selle impordisaidilt, hilisemate modifikatsioonidega odavatest Hiina toodetest: igasuguse metalli(!) prahi välja raputamine, räbusti mahapesemine, plaadi kontaktide jootmine, toitetriak asetatakse KPT8-le. Siiani olen rahul, föön puhub nagu föön, temperatuur ja puhumiskiirus on reguleeritavad. Põhimõtteliselt on föön oma raha väärt. See on suhteliselt värske ost ja töökindluse statistika on veel ebaselge, kuid kahtlustan, et see sobib harva töötamiseks.

Metabo BZ 12SP. Väga vana kruvikeeraja. Haruldus. Neid vist enam ei müüda. Võimaldab tänu heale joondusele ja spindli väljajooksu puudumisele teha üsna delikaatset tööd.

Velleman VTHD02. Mini puur. Või, nagu nad seda ka kutsuvad, Dremel (kuigi see on sama vale kui koopiamasinaid koopiamasinateks nimetada). Kunagi ammu ostsin kampaaniast komplekti, olin rohkem rahul lisaseadmete komplektiga kui külviku endaga. Siiski osutus ta oma dieedi mõningate muudatustega üsna heaks. Algsest toiteallikast töötab, aga koormuse all on kuidagi raske. Umbes kaks aastat tagasi tehti muidugi ainult ajutiselt mobiilne toiteplokk nelja reguleeritava väljundiga 18650 aku kambrist. Minipuur on muutunud autonoomseks. Selle toitumisega hakkas minipuur end palju paremini tundma ja osutus talus väga kasulikuks seadmeks.


Noble NB4000P-4. Multimeeter. See on mugav, kuna juhtmed on täielikult sisse tõmmatud. Omandatud rasketel tudengiaastatel. See tähendab, et kaua aega tagasi. Juhtmed katkesid juba ammu - pidime "opereerima" teisest ebaõnnestunud multimeetrist. Nüüd on juhtmete eemaldamine lõpetatud. Akut ja kaitset on mitu korda vahetatud. See töötab siiani – hämmastav töökindlus keskpärase täpsusega.

Fluke 179. Suure täpsusega multimeeter. Kvaliteetne, mugav ja mis kõige tähtsam - täpne tööriist.

Sai mingisuguse kuulutusena kätte. Kuigi... miks mitte – kus on siis minu komisjonitasud? Kõik need tööriistad on mõeldud üldiseks teabeks. Omal ajal avastasin näiteks eemaldajad, mis muudavad juhtmete eemaldamise protsessist tööst naudinguks ja ma ei kahetse BOSCH GluePeni ostmist üldse. Ehk on sellest väikesest valikust kellelegi abi.
Oma roboti kokkupanemiseks pole sugugi vaja omada erinevaid ja kalleid tööriistu, kuigi kindlasti parandab see töö kvaliteeti ja pakub sellest suuremat naudingut. Piisab tavalisest jootekolbist, mitmest kruvikeerajast ja puurist. Oli ju kunagi ammu selle artikli autori käsutuses vaid tangid, haamer, paar kruvikeerajat, vasktraat, traks (kusagil alles!) ja kaks puuri, jupid telefonijuhtmetest ja rohkest sinisest elektrilintist (sageli varem kasutatud), piisas sellest täiesti lihtsaks autoks, mis nupule vajutades ise sirgu sõitis.
Peamised komponendid
Lugejate arvukate taotluste tõttu annan linke (ebay/aliexpress) põhikomponentidele. Töölingid 2016. aasta septembri seisuga. Tellisin kõik kuus kuud tagasi (veebruar-märts 2016), seega soovitan edasi vaadata - ehk saab nüüd soodsama hinnaga osta.
Šassii, mootorid, rattad, kinnitusdetailid - platvorm (valik kahte värvi) + 4 * (80 mm ratas + kinnitused + mootor (valik kolme kiiruse vahel))
Pöörake tähelepanu järgmisele komplektile - 130 mm ratas + kinnitused + Halli anduriga mootor
Pöörake tähelepanu mahukatele akudele (olen nendega mitu korda töötanud - nende akude tegelik ja deklareeritud võimsus langeb tavaliselt kokku, st tegelikult on neil 3400 mAh!) - Panasonic NCR18650B 18650 / 3400 mAh / 3,7V / kaitsmata HC moodul Bluetooth- 06 5
0.9% See on kohutav – kus on kõnekultuur, lausete normaalne ehitus... autor peab õppima süntaksit ja morfoloogiat! 2
5.9% Mul on raske vastata või selgitan kommentaarides. 12
Üks Arduino ja teiste arvutiplaatide baasil robotite loomise võimalustest on valmiskorpuste kasutamine ja oma täidise väljatöötamine. Turult võib leida piisaval hulgal selliseid raame, mis sisaldavad ka mehaanilist alust (rattad, roomikud, hinged jne). Kui olete valmis korpuse võtnud, saate täielikult keskenduda roboti programmeerimisele. Pakume lühikest ülevaadet sellistest skeletist robotite kehadest.
Miks on vaja roboti kehasid ja skelette?
Roboti loomine on mitmeetapiline protsess, mis hõlmab projekteerimist, kokkupanekut ja programmeerimist. Robootikateadmised piirnevad füüsika, mehaanika ja algoritmiseerimisega. Noored robootikud pürgivad robotite loomise igasse etappi erinevalt. Mõne arvates on roboti mehaaniliste osade loomine lihtsam, kuid programmeerimine on keeruline. Mõned inimesed, vastupidi, programmeerivad hõlpsalt roboti käitumise loogikat, kuid mehaanilise mudeli loomise protsess tekitab raskusi.
Need, kes peavad mehaanika projekteerimise protsessi keeruliseks ja keda erutab rohkem erinevate andurite valimise ja robotiloogika kujundamise protsess, peaksid pöörama tähelepanu robotite ehitamise erinevatele mehaanilistele alustele. Neid müüakse ilma elektroonikata, tegelikult on need tulevase roboti keha või luustik. Jääb vaid lisada neile "aju" (näiteks tahvel Arduino), närve ja lihaseid (andurid ja täiturmehhanismid) ning animeerida (programmeerida). Mõnikord sisaldavad need korpused isegi mootoreid või andureid.
Platvormid 4 rattal - Arduino masina alus
Ratastel platvorm on vaieldamatult lihtsaim ja tõhusaim alus roboti ehitamiseks. Seda tüüpi toorikuid on müügil palju erinevaid. Mõned neist:
Platvorm Arduino roboti loomiseks, valmistatud alumiiniumi sulam. Platvorm on varustatud 4 rattaga, millest igaüks on ühendatud eraldi mootoriga. Mootorid on kaasas. Platvormi saab kasutada auto või mõne muu sõiduroboti alusena. Platvormi suurus on umbes 20 x 20 cm, kaasas on ka kruvid, mutrid ja juhtmed mootorite ühendamiseks.
Sellise aluse oma tulevasele robotile saab osta umbes 75 dollari eest veebipoest DX.com.
Veel üks neljarattaline platvorm Arduinol põhineva roboti loomiseks tõmbab tähelepanu oma ratastega. Nende läbimõõt on 80 mm, laius 60 mm ning need näevad välja elegantsed ja usaldusväärsed. Sellel platvormil on 1,5 mm paksune akrüülist alus. Kere on hea stabiilsusega ja sobib kiiresti liikuva roboti loomiseks. Aliexpress müüb seda robotskeletti 60 dollari eest. Komplekt sarnaneb eelmisele - rattad, mootorid, juhtmed ja kruvid on juba komplektis.

Kahe- ja kolmerattaline šassii sõidurobotite loomiseks
Järgmises kolmerattaline platvorm Arduinol põhineva roboti loomiseks Mootorid on ühendatud ainult kahe rattaga ja see vähendab kulusid. Veebipoes DX.com müüakse sellist šassii 20,5 dollari eest. Alus on valmistatud läbipaistvast akrüülist. Kaasas 2 mootorit, kruvid, mutrid, juhtmed, akupakk 4 AA patarei jaoks. Mõõdud umbes 20 x 10 cm.

Kolmerattaline platvorm Arduino robotile. Foto dx.com

Kaherattaline roboti alus. Foto dx.com
Arduino tankide roomikšassii
Roomikšassii stabiilsemad kui ratastel. Lisaks piisab selle disaini puhul ainult kahest mootorist, et süsteem tööle panna, mis tähendab, et hind on madalam kui neljarattalistel platvormidel. Kõige levinum mudel roomikutel on loomulikult tank, kuid sellisest alusest võib saada platvorm mis tahes kujuga robotile.
Roomikšassii robotpaagi loomiseksArduino baasil. Kaasas 2 mootorit, roomikajam, kruvid, mutrid. Selle šassii mõõtmed on 18,7 cm x 11,5 cm x 4,3 cm. See roomikšassii maksab DX.com veebipoes 42 dollarit.

Roomikšassii robotile. Foto dx.com
Arduino ämblikroboti korpus
Ämblik- üsna populaarne robotite vorm, mistõttu on müügil ka sellised luukered. Ämbliku disain, erinevalt ratastel robotitest, võimaldab liikumist igas suunas.
Esiteks ämblik ja meie ülevaates maksab see Aliexpressis umbes 100 dollarit.

Ämblikroboti korpus. Foto: aliexpress.com
See ümbris ei sisalda elektroonikat ega servosid, need tuleb eraldi osta. Selle spider-mudeliga on soovitatav kasutada servoajamit MG 995. Naljakas, et Aliexpressi veebisaidil saab sellist draivi osta kas 33 dollari või 5 dollari eest (kuigi sel juhul peate ostma 10 tükki). Iga käpa jaoks on vaja ajamit.
Lisaks on suure hulga servode juhtimiseks vaja mitme kanaliga servokontrollerit. Ämbliku lõplik maksumus võib olla üsna kõrge.
Veel üks kuuejalgne skelett ämblikrobot või isegi robotprussakas pälvis mu tähelepanu oma hinnaga 42,5 dollarit. Kuue metalljalaga robot peaks olema, kuigi mitte eriti manööverdatav, stabiilne. Selle prussaka luustik on 24 cm pikk, 18 cm lai ja 12 cm kõrge. Selle musta robotprussaka saate osta Aliexpressi veebipoe veebisaidilt.

Eluase robotprussakale. Foto: aliexpress.com
Humanoidroboti raamid
Mudel tundub päris huvitav humanoid robot maksab umbes 105 dollarit. Samuti pole elektroonikat, kuid loovusele on palju ruumi. Humanoidroboti loomine ja inimese kõnnaku programmeerimine on väljakutseid pakkuvad ja huvitavad ülesanded. Sa võid hakata ise kätt proovima humanoidroboti loomisel, ostes sellise skeleti Aliexpressi veebipoe kodulehelt. Kui uskuda tootja kirjeldust, saate selle raami põhjal isegi tantsuroboti teha.

Kest humanoidrobotile. Foto: aliexpress.com
Valmisrobot, valmiskere või Arduino roboti loomine nullist?
Valmis täisrobotid põhineb Arduino plaadilsobib neile, kes elektriahelad mitte eriti atraktiivne. Ostes töötava robotimudeli, s.o. tegelikult võib valmis kõrgtehnoloogiline mänguasi äratada huvi sõltumatu disaini ja robootika vastu. Arduino platvormi avatus lubab samast komponendid tehke endale uusi mänguasju. Selliste robotite hind kõigub 100 dollari ringis, mis on üldiselt suhteliselt vähe.
Lõpetatud juhtumid, mida me selles ülevaates läbi vaadasime, viitavad suuremale kujutlusvõimele ja suuremale hulgale robotitele. Nendes ei piirdu te ainult Arduino tahvlitega, saate kasutada muid "ajusid". Selle meetodi eeliseks roboti nullist loomise ees on see, et te ei pea end segama materjalide otsimisest ja disainilahendustest. Selline robot näeb välja üsna tõsine ja meenutab tööstuslikku.
Kõige huvitavam, kuid meie arvates ka kõige raskem on täiesti sõltumatu roboti loomine. Vanaraua materjalidest kere arendamine, mänguautode ja muu kasutatud varustuse selleks otstarbeks kohandamine ei pruugi olla vähem põnev kui roboti käitumise programmeerimine. Ja tulemus on täiesti ainulaadne.
Kui oled alles alustamas Arduino robootika õppimist, siis soovitame meie kursust
Kõik hinnad kehtivad 22.05.14 seisuga.
« « Roboti šassii 200 rubla eest
Iga robootik mõtleb robotit looma asudes sellele šassii. Siin on suurepärane idee selle lihtsuse ja madalate kuludega. roboti šassii Hiina autodest.
Vajaliku šassii loomiseks kaks kõige vastikumad hiina mängutankid elektriline. Neid ei pea üldse saama keerata – nii on palju odavam.
Ebanägemisel on kaks eelist: madal hind ja haletsuse puudumine paakide lahtivõtmisel.
Nagu Ideas hoiatab, haiseb selline odav Hiina tööstuse looming pagana, nii et teil pole neist kahju.
Niisiis, meil on doonorpaagid. Mine!
Eemaldame doonorpaakidelt kaaned.

Akupesad on meile endiselt kasulikud, seega puhastame need lihtsalt üleliigsest plastikust.

Vajame mõlemat sektsiooni (igast paagist).

Liimige patareipesad kokku.

Hammustasime ja saagisime teljed kuni käigukastideni välja, et ühest paagi šassiist pool šassii robotile kätte saada.

Kaks koonu pumpamiseks kasutatud hammasratast on ebavajalikuna eemaldatud.
Head päeva, ajuinsenerid! Siin on juhend, kuidas kuidas teha lihtne, väike, mobiilne, stabiilne ja maastikurobot, ilma tarbetute seadmeteta ja kõigi veoratastega.

Olen selle disainiga juba mõnda aega katsetanud. ajumängud ja saavutanud häid tulemusi, mille postitan selles artiklis. Näiteks roboti šassii on kokku pandud Actoboticsi alumiiniumdetailidest, mis teeb kokkupaneku lihtsaks ning tagab stabiilsuse, kerge kaalu ja töökindluse.
Igal kuuel rattal on oma mootor, mis suurendab veojõudu, samas kui mõlema poole mootorid, nii vasak kui ka parem, on koondatud kolmeliikmelistesse rühmadesse, see tähendab, et robot manööverdab nagu tank. Suured rattad suurendavad manööverdusvõimet ja löögisummutust ning hoiavad ära ka kukkumisest tulenevaid vigastusi.
Kontrollitud käsitöö Arduino mikrokontroller, mis vastutab kõigi elektriliste komponentide eest ja millel on ka potentsiaali edasiseks täiustamiseks. Kaugjuhtimispuldi alus Pult on XBee moodul, mida on lihtne kasutada, töökindel ja mis annab vajalikust suurema signaaliulatuse.
1. samm: alumiiniumraam
Raami kokkupanekuks vajame:
3 alumiiniumnurka "Actobotics" igaüks 40cm.
6 alumiiniumist mootoriklambrit
6 12 V mootorit 6 mm võlli läbimõõduga
6 ratast 127x62mm
6 rehvi 5,6 cm
6 kuuskantratta rummu
36 M3x8 kruvi
alumiiniumleht 343x190mm
8 kuuskantvahetükki M3x40mm




2. samm: raami ettevalmistamine






Ühe alumiiniumnurga lõikasime metallviiliga pooleks. Ülejäänud kahel kindlal nurgal tähistame sulgude kohad ajumootorid, puurige kinnituspoltide jaoks 3mm augud (fotol sinine värv) ja keerake kronsteinid ise nurkadesse.
3. samm: raami kokkupanek












Paigaldame mootorid kronsteinidele, asetades need võimalikult madalale. Seejärel kinnitame pikad nurgad üksteise külge kahe lühikesega (mis sai varem lõigatud), punasega näidatud kohtades.
Pärast seda paigaldame alumiiniumlehele 8 vahetükki ja nende abil kinnitame selle nurkadest raami külge.
4. samm: elektroonika





















See samm nõuab teid mõistusega töö elektroonika valdkonnas, eelkõige Arduino ja XBee ahelate kokkupanemine.
Elektriahela kokkupanekuks käsitöö vajalik:
Liitiumaku 3S 4000 mAh
digitaalne elektrooniline lüliti - vajalik võimalikuks hilisemaks uuendamiseks ja selle saab asendada lihtsa lülitiga, mille voolutugevus ei ületa 10 amprit.
Arduino Mega 2560 moodul
XBee Exploreri tahvel
XBee Pro 60 mW antenniga saatja
Sabertooth 12A juhtplaat kahele mootorile
ULN 2803 ja IC-pistik
Alumiiniumplaadile märgime kolm joont, mis vastavad mootorite kolmele teljele (fotol punasega märgitud), seejärel kinnitame kahe esimese telje vahele liitiumaku ja paigaldame siis elektrilüliti, kui otsustate seda kasutada.
Alustame Arduinoga: jootke punane juhe Vinile, must juhe kahele GND-le ja valge juhe TX1-le (18. pin) plaadi tagaküljel, kasutades fotot juhisena. Tahvli paigaldamisel proovige see asetada rataste vahele nii, et USB-port oleks programmeerimiseks hõlpsasti juurdepääsetav. Kinnitame plaadi enda plaadi külge kuue poldiga, millel kummalgi kaks seibi, et tõsta plaat plaadi kohale. Lühise vältimiseks kasutage ka plastist seibe ja mutreid.
Paigaldame Sabertoothi juhtplaadi otse alumiiniumplaadile ja kinnitame selle nelja poldi ja mutriga. Plaat täidab siin ka radiaatori rolli. Järgmisena ühendame diagrammile keskendudes komponendid omatehtud tooted koos.
Paigaldame XBee mooduli enda XBee plaadile ja teeme 4 ühendust: 5V kuni 5V, GND maandusega, DIN TX3-ga (kontakt 14) ja Dout RX3-ga (kontakt 15).
Ja lõpuks paneme väikesele trükkplaadile kokku vooluringi, mis vastutab veesõiduki esiküljel olevate LED-esitulede töö eest, vaatame kokkupaneku ajal ka diagrammi.
5. samm: Xbee programmeerimine


Enne XBee mooduli programmeerimise alustamist on soovitatav tutvuda juhendiga.
Lisaks teadmistele vajame:
USB XBee explorer plaat
USB-kaabel
Pärast programmi X_CTU installimist ja värskendamist konfigureerime iga XBee mooduli samaaegselt vastuvõtjaks ja saatjaks. Määra kolm aju parameeter:
Vastuvõtja jaoks: DL=321, MY=123 ja BD = 3 (9600 baudi).
Saatja jaoks: DL=123, MY=321 ja BD = 3 (9600 boodi).
6. samm: juhtpaneeli kokkupanek
Vajalikud materjalid:
Liitiumaku 3S 800 mAh
Arduino Nano 5V, 16 MHz või sarnane
XBee Exploreri tahvel
XBee Pro 60 mW moodul koos antenniga
juhtkangi
LED
takisti 220 oomi
kaks miniatuurset lülitit
plastikust korpus



Pärast põhiahela kokkupanemist on kaugjuhtimispuldi valmistamine lihtne samm. Sel juhul, nagu tavaliselt, keskendume diagrammile. Arduino kood
7. samm: lõpuks
Tasakaalukas aju trikk sellel on järgmised omadused: pikkus - 42 cm, laius - 32 cm, kõrgus - 12,5 cm, kaal - 3,430 kg.
Kiirus sõltub valitud mootoritest, minu omast ajurobotülekandearvuga 100:1 jõuab see kiiruseni 0,7 m/s (2,4 km/h). Kui vähendate ülekandearvu, siis tõukejõu vähenedes kiirus suureneb. Vastupidi, kui suurendate ülekandearvu: kiirus väheneb, kuid veojõud suureneb.
Video näitab jõudlust maastikul omatehtud tooted.
Olulised punktid:
LED-ide paigaldamisel jälgige polaarsust;
kui ratas pöörleb vastupidises suunas, muutke lihtsalt mootori polaarsust;
kui kogu rataste rühm pöörleb vastupidises suunas, siis muutke Sabertoothi tahvli polaarsust;
kui kõik rattad pöörlevad vastupidises suunas, siis muutke Sabertooth plaadi toitejuhtmete polaarsust.
Sabertooth plaadil on sisseehitatud aku pingeandur, nii et kui isetehtud lakkab töötamast, laadige lihtsalt aku.
Uuendusplaanid: alustamiseks, omaette aju trikk Soovin lisada miniatuurse videokaamera ja audio-video saatja, mida kasutatakse lennukite modelleerimisel. Veesõidukile on plaanis paigaldada ka robot-manipulaatori käsi.
Aga see on plaanis, aga praegu tänan tähelepanu eest ja edu töös!

Täna hakkan avaldama artikleid, mis on pühendatud oma mobiilse roboti loomisele. Perenõukogus otsustati talle panna nimi Robotosh, mistõttu ma oma blogile just sellise nime panin. Selle loomise eesmärk on praktikas uurida erinevaid robotsüsteemide algoritme ja elemente.
Hetkel on minu robot neljarattaline platvorm, millele on paigaldatud mikrokontrolleri plaat, mis on riputatud mitmete andurite ja kasutajaliidestega. Tarkvara on väga lapsekingades, seega analüüsin üksikasjalikult, mida ja miks täpselt nii praegu rakendatakse ning liigun tasapisi edasi, lisades funktsionaalsust ja varustades seda “intelligentsusega”. See on minu esimene robot, nii et võib-olla on mõned selle loomise etapid ekslikud või ummikud.
Idee
Idee esimese ligikaudsusena näeb välja järgmine: autonoomne robot, millel on järgmised omadused:
- 4 ratta platvorm
- Sisekasutus (korter)
- Kontaktivabad meetodid takistuste tuvastamiseks kokkupõrgete vältimiseks
- Juhtimisrežiimid:
- võrguühenduseta „juhusliku jalutuskäigu” režiim ruumikaardi koostamiseks
- kaugjuhtimispuldi režiim
- häälkäskluste täitmise režiim koos häältuvastusega
- Aku laetuse jälgimine ja iselaadimine
- Teabe kuvamine märgilisel LCD-ekraanil
- Helihäire
Roboti šassii
Šassiina otsustasin kasutada ostetud neljarattalist platvormi puhtalt majanduslikel põhjustel (ükskõik kuidas ma arvasin, oli see osade kaupa kallim ja see on üks odavamaid, mida ma leidsin). Minu valik langes DAGU 4WD šassii komplekti šassiile, mis on 4-rattaline mootoritega platvorm. Selline näeb pakett välja.

Erinevate kinnituste paigaldamise platvormid on valmistatud punasest akrüülklaasist, millel on palju kinnitusavasid andurite, kontrollerite ja servomootorite paigaldamiseks. Pean ütlema, et akrüülklaasi puuritakse väga lihtsalt, nii et isegi kui tulevikus midagi valmis aukudesse ei kuku, saate neid alati hõlpsalt teha. Rattad on kummeeritud. Plastkäigukastiga kommutaatormootorid.
Lauad
Mõõdud: 175 x 109 x 3 mm
Laudade vaheline kaugus (kaasasolevate nagide kõrgus): 24 mm
Kliirens: 45 mm
Rattad
Ratta läbimõõt: 67 mm
Velje laius: 26 mm
Mootorid
Pinge: 4,5 - 7,2 V
Tühikäigu pöörlemissagedus: 90 ± 10 p/min
Tühjavooluvool: 190 mA (max 250 mA)
Pöördemoment: 0,8 kg cm
Maksimaalne vool: 1A
Kokkupanemiseks kulub paarkümmend minutit. Kokkupandud šassii näeb välja selline:



Ausalt öeldes oli mul mootoritega varitsus. Need mootorid ei ole mõeldud kodeerijate jaoks, mis on minu jaoks oluline, kuna kavatsen täpsema positsioneerimise jaoks tagasiside andmiseks kasutada koodereid. Seega suure tõenäosusega, kui neid mootoreid pole võimalik ümber teha, vahetan edaspidi mootorid teiste vastu.
Üldiselt näeb kokkupandud platvorm üsna kena välja. Kui poleks probleeme kodeerijatega, oleksin 100% rahul.
Kuidas hindate seda väljaannet?