Prehľad hotových frameworkov na vytváranie robotov na Arduine. Prehľad hotových rámov na vytváranie robotov na Arduino Dvoj- a trojkolesovom podvozku na vytváranie kráčajúcich robotov
Menovité napätie jedného lítium-iónového článku 18650 je 3,6-3,7 V. Plne nabitý článok produkuje 4,1-4,2 V. Ale s minimálnym napätím je to ťažšie - konečné vybíjacie napätie závisí od typu batérie a tento údaj môže kolísať v rozmedzí 2,6-3,2 V. Môžete sa vybíjať aj nižšie, ale je to istá cesta k rýchlej degradácii batérie. Rozhodol som sa spresniť posúdenie napätia produkovaného batériou o nominálny-maximálny rozsah. Potom sa ukáže, že zostavy dvoch, troch a štyroch po sebe idúcich batérií nám dávajú rozsahy 7,2-8,4 V, 10,8-12,6 V, 14,4-16,8 V. Z takejto zostavy potrebujeme získať dve napätia - nejaké napätie na napájanie motory a 5 V na napájanie elektroniky. 6V motory s duálnou batériovou zostavou je možné napájať pomocou DC/DC buck meniča, ale rozdiel medzi minimálnou hodnotou napätia (pri vybití batérie na nominálnu hodnotu bude 7,2V) a 6V bude na objednávku 1,2V, čo nemusí stačiť na stabilnú prevádzku meniča DC/DC buck - aby sa predišlo problémom, je potrebné, aby medzi jeho vstupom a výstupom bol rozdiel napätia aspoň 2V (v skutočnosti môže byť byť menej pre konvertory s nízkym výpadkom, ale nebudeme sa im venovať). Zostava troch prvkov je pre nás celkom vhodná, potrebné napätia získame pomocou step-down DC / DC meničov. Motory je možné napájať aj na 9V, vtedy sa v najhoršom prípade dostaneme na rozdiel 1,8V, čo by malo stačiť. Zostava štyroch prvkov je tiež vhodná, ale musíte pochopiť, že prídavná batéria je váha navyše a zaberá miesto, hoci spotreba energie celej batérie je vysoká.
Druhým spôsobom, ako organizovať napájanie, je použiť paralelné pripojenie rovnakých batérií a konvertora DC / DC boost. Potom z 3,6-4,2 V možno napätie zvýšiť na 5 V pre elektroniku a až na 6-9 V pre motory. Zdá sa, že kapacitu takejto batériovej zostavy je možné ľahko meniť pridávaním nových článkov, no nezabúdajte, že použité batérie musia mať podobnú kapacitu a vnútorný odpor.
Existujú špeciálne riadiace dosky na nabíjanie/vybíjanie sériových alebo paralelných batérií. Ochranné ovládače chránia zostavu batérie pred prebitím alebo vybitím (regulácia napätia), skratom, prekročením povoleného vybíjacieho prúdu. Pri použití takýchto jednoduchých dosiek je potrebný externý zdroj s obmedzením nabíjacieho prúdu. Regulátory nabíjania/vybíjania sú schopné samostatne nabíjať batérie metódou cc/cv s obmedzením nabíjacieho prúdu. Pokročilé ovládače pre sériové pripojenie batérií dokážu zabezpečiť aj samostatné nabíjanie každej batérie - vyrovnávajú články batérie.
Zvolil som sériovú schému zapojenia batérie pomocou ochrannej dosky a externej nabíjačky. V budúcnosti môže byť takáto jednoduchá riadiaca doska nahradená vyváženým regulátorom nabíjania. Aj keď pri paralelnom zapojení nie je potrebné vyvažovanie, je potrebné mať na pamäti, že ak je jedna batéria opotrebovaná, ovládač to nedokáže zistiť a môže to byť plné. Za zváženie stojí aj fakt, že prevádzkové režimy každej batérie sa budú líšiť. Napríklad pri odpojení rovnakého napájania budú musieť batérie v paralelnom zapojení poskytnúť väčší prúd ako v paralelnom zapojení.
Preto sú vhodné motory s menovitým napätím 6 V a pracovným rozsahom 3-9 V. Zvolil som motor s otáčkami 281 ot/min a spotrebou, v kľudovom režime, 80 mA. Pri zaťažení otáčky klesnú na 238 ot./min., prúd sa zvýši na 380 mA, pričom motor produkuje výkon 2 W a vyvinie krútiaci moment 0,5 kg * cm. Po zastavení motora sa krútiaci moment zvýši na 4 kg * cm a prúd na 900 mA. Všetky tieto charakteristiky boli prevzaté z tabuľky zverejnenej na stránke jedného z predajcov daného tovaru, keďže som nenašiel normálny "datasheet".
Zostava trupu a podvozku
Objednal som si nasledujúce motory.
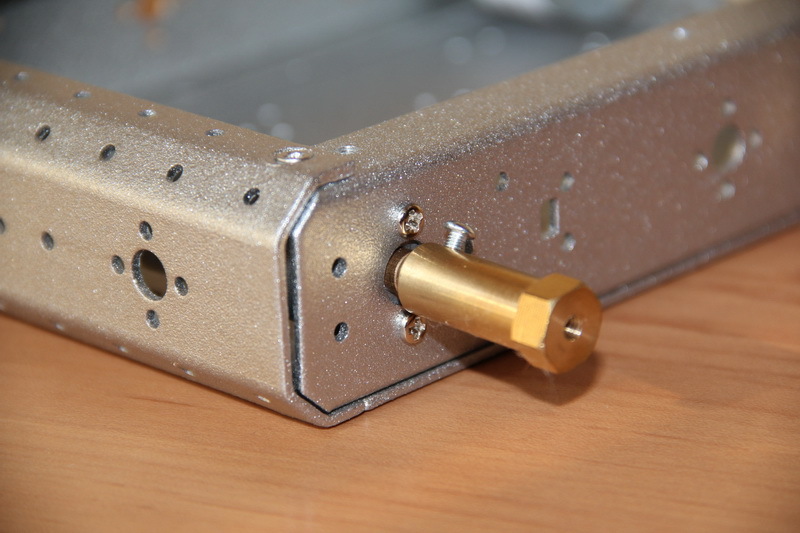
Ak sa pozriete na fotografiu, môžete vidieť drážky na hriadeľoch vyčnievajúce z motorov. Pre tieto motory sa našla sada spojok a kolies.

Kolieska s priemerom 80 mm, mäkká guma, s hrotmi.


Samotnú základňu som chcel vyrobiť zo širokých hliníkových rohov (alebo z niečoho podobného, čo sa dá zohnať v železiarňach), s ktorým vytvorím „bočný“ rám, ktorý je uzavretý nejakými ľahkými, odolnými kovovými platňami. Na správnych miestach sa vyvŕtajú otvory a podľa potreby sa vyrežú závity. Najprv som sa však rozhodol pátrať po tom, čo ponúka čínsky priemysel. A našiel som stavebnicu - stavebnicu podvozku na stavbu robota, ktorá obsahovala samotnú karosériu, vyššie spomínané motory, spojky a kolesá, ako aj priehradku na batérie pre AA batérie, vypínač, zásuvku a upevňovacie prvky. Samotné puzdro má veľa otvorov, čo ho logicky odľahčuje a ich prítomnosť by mala minimalizovať množstvo zámočníckych prác.


Po odhadnutí rozmerov a objemu vnútorného priestoru (súbežne bola zvolená elektronika pre platformu, ktorá v tomto prípade musela pasovať) som si objednal tento kit. Na motoroch, ktoré prišli, ako môžete vidieť vyššie, je z nejakého dôvodu uvedené JGA25-370-9v-281rpm. Prečo práve 9v, keď nominálna hodnota tejto podskupiny je 6 V, nerozumel som, ale Číňania pravdepodobne vedia lepšie, čo písať, aby sa lepšie predávali.
Samotné puzdro váži takmer 400 gramov. Z akého je materiálu, ťažko odpovedám, ale na čistý hliník to nevyzerá.




Odstráňte kryt a nainštalujte motory. Otvory pre motory majú priemer akurát pre skrutky M3, nie je tu žiadna rezerva na nastavenie polohy, ale úprimne povedané, nespôsobilo to problémy - otvory jasne zodpovedajú závitom na skrini motora.



Inštalujeme spojky.

A roztočte kolesá.


Výsledkom bola hotová plošina so svetlou výškou okolo 23 mm.

Hmotnosť „nečinného“ podvozku bola o niečo viac ako kilogram. Pamätáte si obrázky s meraním hmotnosti jednotlivých dielov? 393+(58+85+20)*4 = 1045 gramov. Celá zostava váži 1057 gramov. 12 gramov pridalo 16 skrutiek.

Tu je taká vymyslená, celkom pekná platforma.

Elektrické schéma
Tu stojí za to vysvetliť dôležitý bod, prečo práve táto veľryba. Faktom je, že ak si puzdro vyrobíme sami, jeho vnútorný objem môže byť ľubovoľný. Zakúpené puzdro nám poskytuje prísne fixný objem, do ktorého sa musí všetko zmestiť. V ideálnom prípade existuje aj rezerva. Toto je potrebné najprv vziať do úvahy a pochopiť: či sa potrebná náplň v tomto konkrétnom prípade zmestí alebo nie, a bude potrebné buď vymeniť elektroniku, alebo zvoliť iné puzdro. Vo vnútri skrinky budú nainštalované: motory, batéria, ovládač pre motory, napájacia doska, na ktorej bude umiestnená aj elektronika - rovnaké meniče napätia.Zdá sa, že je jasné, čo presne budeme mať vo vnútri. Ale ako sa to všetko spojí? Ak máte nápad, ale nedokážete vytvoriť jeho obraz, nemáte nápad. V elektronike sa ukazuje, že by mali existovať dva obrázky - vizuálny, ktorý je už celkom vymyslený, a elektrický (v skutočnosti existuje aj algoritmický - keď je opísané správanie zariadenia kvôli jeho schopnosti hardvéru a/alebo softvéru (funkcia firmvéru).
Veľa času trávim dochádzaním do práce. Všeobecne povedané, pri správnom prístupe sa dá dlhá cesta premeniť na plus čítaním kníh, sledovaním / počúvaním populárno-vedeckých programov alebo audio kníh, ktoré by ste nikdy nečítali, nepočúvali alebo nepozerali. Práve vďaka takýmto podmienkam som sa stal fanúšikom a počúval všetky príbehy Modelu na montáž (aby v komentároch neboli žiadne otázky -). Robotické smilstvo nebolo výnimkou a koncept platformy som premyslel a nakreslil na tablete.
Diagram bol nakreslený vo OneNote. Obrázok je klikateľný. Áno, hanbím sa - schéma zapojenia vyzerá bez princípu. Posledné tri týždne nemôžem venovať čas dolaďovaniu článku a už vyvstala otázka - vôbec niečo zverejniť alebo to odložiť „na neskôr“. Rozhodol som sa to zverejniť týmto spôsobom, inak „na neskôr“ to môže byť plné. Nakreslím normálne schémy - vymením obrázky. Na druhej strane tento dizajn vyzerá v štýle pôvodného DIY. V práci alebo doma, keď sa vytvorí nejaký nápad, najprv sa vezme obyčajný list papiera a obyčajná ceruzka ...
Pozrime sa na koncept, čo a s čím budeme spájať. K regulátoru lítium-iónových batérií D1 sú pripojené tri batérie 18650. Celý obvod má „spoločnú zem“, na ktorú je pripojený výstup P-regulátora D1. Výstup P+ je cez poistku FU1 a spínač SW pripojený na vstupy DC/DC meničov D3 a D4. Menič D3 generuje napätie pre motory, D4 - pre napájanie všetkej elektroniky. Výstupy týchto meničov sú pripojené na budič motora D5, na ktorý sú motory pripojené. Motory ML1, ML2 na ľavej strane sú pripojené ku kanálu MA a MR1, MR2 na pravoboku sú pripojené ku kanálu MB. Ovládač je dvojkanálový, čo znamená, že bude možné ovládať dve skupiny motorov (kanály A a B), ale nie jednotlivo pre každý motor. Porty ENA, ENB, IN1-IN4 sú určené na ovládanie rýchlosti a smeru otáčania motorov. Odporový obvod, ktorý generuje napätie Vbat', je zvolený tak, aby v rozsahu 0 ... 5 V tvoril telemetriu napätia Vbat sady batérií. Ak Vbat = 13 V (čo by nemalo, pretože batéria dokáže dodať maximálne 12,6 V, ale som trochu v bezpečí), potom Vbat' = 3,94 V (to znamená, že hodnota zaručene neklesne nad hranicou 5V). Prúd pretekajúci odporovým obvodom pri 12 V bude 3,6 mA a tieto straty som považoval za prijateľné (asi 0,1 % pri kapacite batérie 3000 mAh). Na vstup regulátora D1 je pripojená zásuvka pre externé napájanie. Z diagramu však vidíme, že je pripojený cez relé D2.
Najprv chcem vysvetliť prítomnosť 10 kΩ odporu, ktorý vytiahne jeden z kolíkov napájacieho konektora na napätie 5 V. Máme napájací konektor s tromi výstupmi. Dvojica výstupov prenáša napájacie napätie. Tretí výstup je informačný. Skratuje sa na záporný výstup (máme ho pripojený k zemi), ak v zásuvke nie je zástrčka a otvára sa, ak je zástrčka zasunutá do zásuvky. Tak dostaneme telemetrický signál Vinon' o pripojení napájacieho zdroja: ak Vinon' = 0, potom externé napájanie nie je pripojené, ak Vinon' = 5 V, je pripojené. Rezistor 10 kΩ vytiahne tento výstup až na 5 V. Po pripojení zástrčky bude cez odpor tiecť prúd 0,5 mA, čo je celkom prijateľné.
Keď je externý zdroj pripojený cez normálne zopnuté relé D2 a poistku FU1, batérie sa začnú nabíjať. Normálne zatvorené relé znamená, že jeho výstupy sú vždy zatvorené a otvorené iba vtedy, keď je na ovládací kontakt privedené napätie. Prečo relé D2? Povedzme, že toto relé nemáme. Ak bol napájací zdroj pripojený k platforme, ale zabudli ste ho zapojiť do zásuvky, ako doska mikrokontroléra vie, či sa batéria nabíja alebo nie? Čo ak je napájací zdroj zapojený do zásuvky, ale nevytvára napätie? Alebo všetko funguje, ale zdroj vydáva len 10V namiesto požadovaných 12V? A ak som takýto zdroj (ktorý vydáva len 10 V) pripojil k ešte nie úplne vybitej batérii a vydáva 11 V, tak ako mám vedieť - týchto 11 V tvorí batériový blok (ktorý v skutočnosti nedáva nad 10V) Alebo vonkajší zdroj? Pre takéto situácie bol navrhnutý algoritmus, pre ktorý bolo potrebné relé. Dozvieme sa o pripojení externého zdroja energie Vinonovou telemetriou. Vypnite relé a pozrite sa na Vin' telemetriu. Ak to vyhovuje a toto napätie je v očakávanom rozsahu, potom zapnite relé a signalizujte proces nabíjania. Ak nie sme spokojní, relé nezapíname a signalizujeme poruchu. Nechajte palubnú riadiacu dosku, a nie platformu, riešiť proces analýzy a indikácie. Aby sme to dosiahli, dáme mu všetky potrebné napätia a riadiaci signál pre Vinoffovo relé. Riadiaci vstup reléového modulu pretiahneme cez odpor 10 kΩ na 5 V, čím zabezpečíme, že relé bude neustále zapnuté. Privedením 0 V na tento vstup sa relé deaktivuje.
Ale prečo práve predpotopné mechanické relé? Koniec koncov, môžete dať tranzistor MOSFET. Bol tu taký nápad, ale muselo sa od neho upustiť. Moderné MIS tranzistory majú v otvorenom stave nízky odpor (desiatky miliohmov) a keď preteká prúd 2-5 A, nedôjde na nich k veľmi výraznému poklesu napätia a v dôsledku toho k zahrievaniu - samotné puzdro tranzistora môže rozptýli malé množstvo energie aj bez radiátora. Ale to je všetko o schéme, v ktorej bude takýto digitálny kľúč ovládať pripojenie zdroja energie k pasívnej záťaži. Tranzistor vložíme medzi dva zdroje, v dôsledku čoho môže byť rozdiel napätia medzi kolektorom a zdrojom značný, čo povedie k zvýšenému odvodu tepla a tranzistor sa veľmi zahreje. Na otvorenie alebo uzamknutie tranzistora budete tiež musieť vytvoriť riadiaci obvod (ovládač), pretože úroveň riadiaceho napätia z dosky mikrokontroléra je 5 V, čo nestačí na vytvorenie rozdielu napätia medzi hradlom a zdrojom na ovládanie tranzistora. (na ovládanie tranzistora, napr. IRFZ44N, budeme musieť priviesť 8-12 V na jeho hradlo, aby sme ho otvorili). Či už ide o hotový reléový modul, ktorý stačí pripojiť a ktorý, ak je už zopnutý, zaručene bez problémov prepojí výstup so vstupom.
Získali sme tak nielen spínaciu dosku, ale plnohodnotnú napájaciu dosku. Doska je vybavená DC/DC meničmi, odporovými obvodmi, poistkou a kopou konektorov pre pripojenie elektroniky. Štrukturálne možno rozlíšiť dva konektory. Konektor CON1, ku ktorému sa pripojí batéria, vypínač / tlačidlo, napájací konektor, reléový modul, motory, doska ovládača motora - všetky periférie vnútri platformy. A konektor CON2, ktorého účelom je pripojenie k riadiacej doske. Telemetrické a riadiace signály, napätie 5 V je vyvedené na tento konektor a je tiež užitočné „vyhodiť“ napätie z batérie Vbat - dávame možnosť usporiadať si vlastné napájacie kanály s rôznymi napätiami, napríklad 6 V na napájanie serv.
Elektronika podvozku
Elektronika bola vybraná súbežne s vývojom elektrického obvodu zariadenia.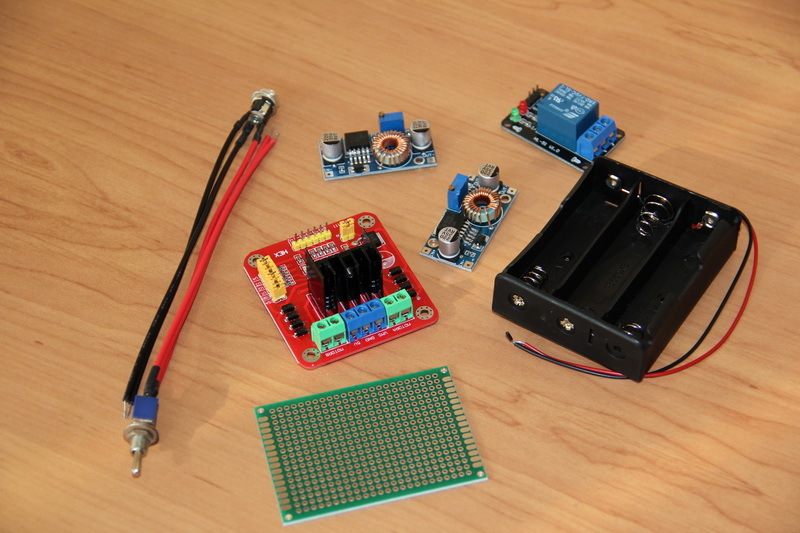
Sieťová zásuvka s prepínačom začala fungovať z prijatej súpravy podvozku. Bol vybraný a zakúpený driver pre motory na báze čipu L298N, doska meniča DC/DC XL4005, nemenovaný reléový modul, priehradka na batérie a doska plošných spojov s rozmermi 50x70 mm a rozstupom otvorov 2,54 mm.
Okrem toho budeme potrebovať aj nasledujúce materiály.

V hornej časti fotografie môžete vidieť niekoľko dlhých kolíkových konektorov s rozstupom 2,54 mm, ako aj zásuviek, dole - kovové kontakty na kábli, vľavo - zásuvky pre ne, vpravo - skrutky M2, matice a podložky. Konektory na doske a kábli v rôznych obchodoch sa nazývajú inak. Z historických dôvodov nazývam hlavičky pinov PLS, zásuvky na doske - PBS, konektory na kábli - BLS. Na internete, na zahraničných stránkach sa takéto konektory hľadajú podľa dopytu ako „2,54mm konektor“ alebo „dupont konektor“. Okrem toho budete potrebovať rôzny spotrebný materiál - spájku, tavidlo, drôty atď., Ako aj sadu ručného náradia - nožnice na drôty, pinzety, skrutkovače atď. - tých, ktorí robia aspoň nejaké DIY (Do It Yourself - urob si sám).
Pred objednaním elektroniky a kufríka som prišiel na to, že vybraná elektronika by sa mala bez problémov zmestiť do interiéru. Je čas to skontrolovať: usporiadame elektroniku a označujeme budúce sedadlá.


Teraz začneme pripravovať dosky.
Začal som s batériou. Regulátor lítium-iónovej batérie bol „zasadený“ na tavné lepidlo a vývody kontaktov boli k nemu prispájkované podľa schémy zapojenia. Myslím, že čitateľov bude zaujímať, čo sa robilo a akým nástrojom, preto som na konci článku pod spoiler zverejnil obrázky niektorých používaných zariadení s mojimi krátkymi komentármi. Tavné lepidlo sa nanášalo tepelnou pištoľou. Ešte predtým som však musel popracovať na takpovediac zvýšení spoľahlivosti tohto oddielu. Všetkých, ktorí sa chystajú niečo urobiť, upozorním - je lepšie neurobiť moju chybu a vziať si odolnejšie priehradky na batérie. Kedysi som takéto priehradky v maloobchode nijako nevedel nájsť a keď som ich našiel, veľa som ich od radosti, pre jednoduchosť duše zabodoval. A nie je to pre nich také jednoduché. Pretože v tomto oddelení batérie s plochými, nevyčnievajúcimi kladnými podložkami jednoducho nedosiahnu kontakt. Okrem toho sa všetky pružinové kontakty otáčajú, kontakt je zlý. Preto som musel zaskrutkovať skrutky M2, odhryznúť prebytok, naskrutkovať matice a dotiahnuť, aby sa zlepšil kontakt. To sa mi však zdalo málo a navyše som všetky spoje dôkladne zaspájkoval. Lebo ak sa niečo robí, tak to musí byť spoľahlivé, aby to v budúcnosti nerobilo problémy a potom sa k tomu už nevracalo.
Treba poznamenať, že pre lítium-iónové batérie sa používa bežný regulátor bez vyváženia. To znamená, že keď sa jedna z troch batérií nabíja, ovládač s najväčšou pravdepodobnosťou preruší nabíjanie všetkých batérií. V skutočnosti ide len o ochrannú dosku proti nízkemu vybíjaniu a prebíjaniu batérií a reguláciu vybíjacieho prúdu. Preto je žiaduce používať batérie s rovnakou reálnou kapacitou. Ak použijete regulátor s vyvažovaním, potom je výber podľa kapacity menej dôležitý a batérie sa budú využívať efektívnejšie, ale takéto regulátory sú drahšie a zaberajú viac miesta. Ako si vybrať batérie s rovnakou reálnou kapacitou? Koniec koncov, po zakúpení rovnakých batérií z rovnakej série, dokonca aj od značiek, sa kapacita môže líšiť o 5-10% a čínske batérie s nápismi 6000-8000 mAh sú vo všeobecnosti batérie s neznámou kapacitou. Na meranie reálnych kapacít som použil nabíjačku OPUS BT-C3100, ktorá je v mojom okolí pomerne populárna. Pomocou nej bolo skontrolovaných 12 zakúpených batérií a vybrané tri, ktorých rozsah kapacít je minimálny a nepresahuje niekoľko percent. Kapacita batérií LG LGABC21865 bola deklarovaná na 2800 mAh, v skutočnosti sa však pohybovala v rozmedzí 2400-2500 mAh (testované pri prúde 700 mA).
Malá odbočka v podobe zamyslenia. Nabíjačka nám vypočítala kapacitu batérií s prihliadnutím na ich nabitie do 4,2 V a vybitie, ak sa nemýlim s OPUS BT-C3100, do 2,8 V. V našom prípade by sa batérie nemali vybíjať menej ako nominálna hodnota 3,5-3, 7 V. To znamená, že naša pracovná kapacita batérií je oveľa nižšia ako nameraná. Toto treba brať do úvahy. Možno sa v budúcnosti oplatí uvažovať o batériovom balíku so štyrmi batériami. Je možné jednoducho vymeniť batériu a napájací zdroj na nabíjanie? Poďme hádať. Dostaneme napäťový rozsah 14,4-16,8 V. Napäťové meniče pracujú so vstupným napätím do 32 V. Odporové deliče nám poskytnú napäťový rozsah telemetrických signálov 4,3-5,1 V, čo je mierne za horným rozsahom 0-5 Q. To sa však dá odvrátiť na úrovni riadiacej dosky - ak je telemetrické napätie 5 V, potom sa batéria po chvíli takmer nabije. Na druhej strane, ak znížite napätie na motoroch na 6-7 V, môžete existujúcu batériovú jednotku viac vybiť a batérie využívať efektívnejšie - v tomto prípade stačí nastaviť jeden menič napätia. Na prvý pohľad existuje priestor na budúci výskum bez akejkoľvek zmeny hardvéru a toho, ako presne interpretovať telemetrické signály v závislosti od nainštalovaného akumulátora - to nechajte rozhodnúť na úrovni riadiacej dosky, teda zatiaľ vy nemôžem na to myslieť.
Výstupné vodiče z výsledného akumulátora som odizoloval špeciálnymi kliešťami (stripper) a zalisoval ich do kovových kontaktov pomocou lisovacích klieští (krimpovač), prispájkoval ich kvôli spoľahlivosti a nasadil na ne plastové puzdrá, čím som získal konektory BLS. Na spájkovanie bola použitá spájkovacia stanica, ako spájka POS-61 bez kolofónie a ako tavidlo no-clean FluxPlus NC-D500.



Po zložení batériovej jednotky a vložení batérií do nej nebude nič produkovať. Takto je usporiadaných veľa ovládačov lítium-iónových batérií - odpájajú záťaž v prípade skratu, silného vybitia, nadmerného vybíjacieho prúdu. Aby ste „resetovali“ ochranu a uviedli batériu do funkčného stavu, musíte na kontakty +P / -P priviesť 12-12,6 V. To isté je potrebné urobiť po prvom pripojení batérií k ovládaču. Potom sa môžete uistiť, že jednotka produkuje napätie, ak sú batérie správne pripojené k ovládaču.
Na nabíjanie takýchto akumulátorových zostáv sú k dispozícii napájacie zdroje s výstupným napätím 12,6 V (3x4,2 V). Pri takomto napájaní sa batérie využijú efektívnejšie, hoci sa dajú použiť aj zdroje 12 V. Už mám taký zdroj s výkonom 12,6 V a prúdom 5 A. deklaroval charakteristiky. Najjednoduchším testom je test nosnosti. Na tento účel som použil keramické odpory 1 ohm 10W a 4,7 ohm 10W. Po zostavení zostavy s odporom 2,5 ohmu z takýchto odporov som k nej pripojil napájací zdroj a zmeral napätie na jeho výstupe. S menovitým prúdom 12,6 / 2,5 \u003d 5 A môj zdroj vydal 12,6 V - to je vynikajúci výsledok. Čínske napájacie zdroje, na ktorých je niečo napísané, ako napríklad 12V3A, sa často začínajú „klesať“ o 10-20% pri zaťažení iba asi 1 A.


Analogicky bol pripravený vypínač a elektrická zásuvka.

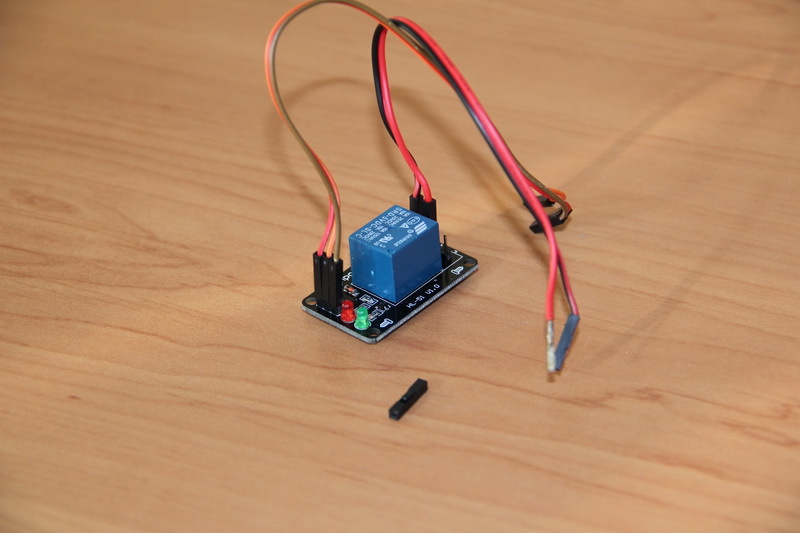
Svorkovnica bola odstránená z reléového modulu pomocou sušiča vlasov a PLS kontakty boli spájkované. Na pripojenie tohto modulu k napájacej doske som vyrobil vodiče - odizoloval som, zlisoval a prispájkoval napájacie vodiče (cez ktoré sa pripojí napájací konektor a batéria) s prierezom 18-20 AWG. A na ovládanie som použil vodiče, ktoré mám, s tenšími vodičmi, ktoré sa ľahko hľadajú podľa názvu "Dupont".

To isté sa stalo s vodičom motorového vozidla.


„Nohy“ boli prispájkované k meničom DC / DC. Stojí za zmienku, že tieto kontakty sú vyrobené z kovu, ktorý je dobre spájkovaný iba aktívnym tokom. Potom namiesto FluxPlus použijem LTI-120, po ktorom nasleduje utretie spájkovacích bodov handričkou navlhčenou v izopropanole, aby sa odstránili zvyšky taviva.

Teraz vyrábame našu dosku s elektronikou. Na začiatok je dobré si vo všeobecnosti predstaviť, ako a čo bude na doske zapojené. To znamená, že skúste nakresliť obvodovú dosku.
[Napájacia doska]

Hádajte, kde som na túto dosku prišiel a "zlízol"? Na doske vidíme dva konektory, dva meniče napätia. Objavil sa ďalší jumper (odnímateľný jumper), ktorý je možné nainštalovať vylúčením poistky z elektrického obvodu - urobil som to zámerne kvôli banálnej absencii poistky v čase výroby dosky.
Odspájkovanie dosky je dosť únavná a starostlivá práca. Na napájanie som použil vodiče 18-20 AWG, na ostatné signály 26-30 vodičov AWG. Prečo tá doska a problémy s kabelážou? Pretože máme len prvý prototyp. Niečo sa môže zmeniť, takže prespájkovanie kabeláže je jednoduchšie ako rezanie tratí a spájkovanie všemožných prepojok na hotovej doske plošných spojov. Výroba dosky s plošnými spojmi si vyžaduje čas - pestovanie, výroba masky, morenie, vŕtanie, cínovanie, spájkovanie - je nepravdepodobné, že to bude trvať kratšie ako výroba dosky s „káblovaním“. Aj keď doska s plošnými spojmi bude spoľahlivejšia a bude vyzerať profesionálnejšie.
Z rovnakých dôvodov moduly DC / DC meničov nie sú spájkované na doske, ale sú vyrobené vo forme odnímateľných modulov, v ideálnom prípade musia byť po počiatočnom odladení dodatočne pripevnené ku konektoru, napríklad kvapnutím horúceho lepidla . Nie je to zlé rovnakým spôsobom, aby sa zvýšila spoľahlivosť pripojenia všetkých konektorov. Ale kým máme prototyp, je pre nás pohodlnejšie urobiť všetko odnímateľné, aby sme v procese budúceho ladenia mali voľný prístup k akémukoľvek dôležitému uzlu a v prípade potreby uľahčili jeho výmenu.




Po výrobe dosky je potrebné skontrolovať, či je prijatá doska v súlade so schémou zapojenia a schémami zapojenia. Pomocou multimetra kontrolujem, či na vstupoch a výstupoch nie je skrat (kontakty je lepšie „neprezvoniť“, ale zmerať ich odpor, pretože v prípade chybnej výroby alebo dizajnu napr. odpor sto ohmov sa môže vytvoriť na vstupe, ktorý nemusí „zazvoniť“, ale jeho prítomnosť bude chybou v obvode a môže spôsobiť veľké problémy) a tiež sa uistite, že je všetko pripojené tak, ako má byť vo vnútri dosky.
Po kontrole pred montážou by ste sa mali uistiť, že doska bude fungovať normálne so všetkými pripojenými perifériami. Aby ste to dosiahli, musíte najskôr pripojiť batériu, vypínač a prepnúť vypínač. LEDky na meničoch napätia by sa mali rozsvietiť a nič nebude horieť. Kým nie je nič pripojené, je potrebné upraviť výstupné napätie meničov. Potom sa napájanie vypne, reléový modul sa pripojí a napájanie sa znova zapne. Všetky periférie sú tak postupne pripájané a pod kontrolou.
Inštalácia a pripojenie elektroniky platformy
Elektronika je pripravená. Teraz ho musíte nainštalovať. Pamätáte si, že sedadlá elektronických tabúľ boli označené? Na správnych miestach sa vyvŕtajú otvory pomocou akumulátorového skrutkovača. Potom sú leštené mini-vrtákom s brúsnou tryskou. Do otvorov sú zaskrutkované skrutky M2. Podložky musia byť umiestnené pod skrutkami a maticami. Okrem toho som naskrutkoval druhú maticu - poistná matica poskytne spoľahlivejšie závitové spojenie a zníži pravdepodobnosť odvíjania. Vyrábame stroj.
Všimnite si, že vzdialenosť medzi dvoma susednými motormi je dosť veľká. Toto je dôležitý bod, ktorý stojí za to venovať pozornosť z nasledujúceho dôvodu. Faktom je, že vybrané motory sú bez spätnej väzby. Len na ne privedieme určitú úroveň napätia a roztočia sa určitou rýchlosťou. Charakteristiky motorov sa však môžu líšiť, čo určite povedie k problémom pri priamočiarom pohybe. Ak je rozptyl motorov malý a robota bude ovládať len operátor, ktorý môže pohyb vždy korigovať, tak to nemusí byť výrazný problém. Ak je však rozptyl významný alebo robot bude musieť v automatickom režime prejsť dlhú vzdialenosť „po priamke“, potom musí byť poskytnutá spätná väzba. Existuje séria motorov GM25-370 identického dizajnu, na ktorých sú už nainštalované Hallove snímače. Čo to je? Na zadnej strane motora je na podlhovastom hriadeli pripevnený disk, na ktorom je umiestnený magnet, ktorý ovplyvní Hallov snímač. Po každom úplnom otočení kotúča dostaneme impulzný signál, ktorého spracovanie je možné nastaviť na počet otáčok za minútu. Na našej platforme je teda položený pomerne vážny základ pre budúcnosť: je možné inštalovať motory so spätnou väzbou, pripojiť ich k výkonovej doske, ktorá na nich bude napájať snímače, a prenášať telemetrické signály do riadiacej dosky - ovládania. systém dokáže automaticky vyrovnať otáčky motorov.


Drôty som prispájkoval k motorom v súlade so značkami na nich - na každom motore bola v blízkosti jedného z dvoch kontaktov aplikovaná červená bodka. Po obdržaní motorov som ich skontroloval, ale nevenoval som pozornosť správnosti tohto označenia. Jeden z motorov, mimochodom, prišiel s manželstvom a vôbec sa neposúval, predajca mi láskavo poslal náhradný, ktorý mi dorazil najmenej mesiac. Následne sa ukázalo, že jeden z motorov mal pomiešané označenia, ale na tom nezáleží - stačí zmeniť polaritu pripojenia tohto motora k výkonovej doske. Pri pohľade dopredu poviem, že rovnaká situácia nastala aj pri spojení „dosiek“ - keď bol zadaný príkaz „vpred“, kolesá na pravoboku sa otáčali dopredu, na ľavej strane - dozadu. Toto je tiež opravené zmenou polarity pripojenia požadovaného kanála ovládača motora k výkonovej doske. Zmena polarity pripojenia - nie je potrebné nič spájkovať ani prerábať, stačí len vymeniť vodiče.
Aby sa vylúčil elektrický kontakt medzi doskami elektroniky a puzdrom, vyrezal som plastové platne z blistrového balenia na spodok platformy.

Nainštalujte batériu. Plast je veľmi mäkký a pod hlavou skrutky doslova prepadáva, nezachráni ani podložka, takže som musel použiť dlhú kovovú platňu.


Všetky naše skrutky a matice na spodnej strane mierne znížili svetlú výšku a vyzerajú celkom esteticky.


V miestach, kde sú inštalované elektronické dosky, izolujeme dno. Tiež sme vystrihli a umiestnili pásik plastu na kovovú platňu v batérii, aby sme zabránili poškriabaniu puzdra batérie na hlave skrutky, lítium je vážne!


Inštalujeme a upevňujeme elektronické dosky a napájací konektor.






Nočná mora, koľko drôtov... Periférne zariadenia pripájame k napájacej doske.


Elektronika ovládania plošiny
Ako viete, v zásade je úloha dokončená. Platforma bola prijatá, všetko dopadlo celkom dobre. Na ovládanie platformy môžete použiť akýkoľvek mikrokontrolér, FPGA, dosky Arduino, Intel Galileo a ďalšie.Vybral som si dosku Arduino Nano, našiel som lacnú a pohodlnú rozširujúcu dosku na pripojenie periférií a bluetooth modulu k nej. Základnou myšlienkou je ovládanie našej platformy zo smartfónu cez bluetooth. Rozširujúca doska s množstvom kontaktov na pripojenie externých zariadení vám v budúcnosti umožní bezproblémové pripojenie budúcich periférií robota.


Teraz musíme navrhnúť a vyrobiť obvodovú dosku pre túto elektroniku. Vyrobíme si „sendvič“: dosku plošných spojov, na ktorej je nainštalovaný modul bluetooth a rozširujúcu dosku, v ktorej je zasa nainštalovaná doska s mikrokontrolérom.

V porovnaní s napájacou doskou je táto doska takmer čisto spínacia. V strede je kábel pripojený k 18-pinovému trojradovému konektoru, ktorý spája túto riadiacu dosku s napájacou doskou. Z tohto konektora sú signály smerované na požadované piny rozširujúcej dosky, ktoré potom idú na požadované, vopred zvolené piny mikrokontroléra. Tiež 5 V a Vbat sú vyvedené na samostatné kolíky na doske. Napájanie je privádzané do bluetooth modulu na doske, jeho Rx/Tx vstupy sú pripojené k Rx/Tx vstupom Arduino Nano dosky cez rozširujúcu dosku. Na doske je odnímateľná bipolárna LED, ktorej účelom je indikovať všetky procesy súvisiace s napájaním. LED dióda môže tvoriť zelenú a červenú stálu žiaru, blikať s určenou frekvenciou - to by malo stačiť na indikovanie normálneho napätia akumulátora, jeho vybitie, indikovanie procesu nabíjania a hlásenie stavu pripojeného zdroja energie.
Aby som nemal zmätok v tom, čo a kam pripojiť, schematicky som nakreslil dosku Arduino Nano a distribuoval signály pre ňu.

Porty Rx / Tx sú obsadené modulom bluetooth, ktorý funguje prostredníctvom protokolu UART. Signály IN1-IN4, ak je to možné, sú pripojené k digitálnym portom - polarita týchto signálov určuje smer otáčania motorov a ENA / ENB k tým portom, ktoré umožňujú vydávať PWM signály - tieto signály nastavujú rýchlosť otáčania motorov. Hodnoty telemetrických signálov platformy budú digitalizované analógovými vstupmi A0-A3 dosky Arduino Nano. LED dióda zaberá porty A4 a A5 a je pripojená pomocou prepojok. Faktom je, že tieto dva porty sú potrebné pre jednoduchú organizáciu protokolu I2C a ak to potrebujeme, môžeme jednoducho odstrániť prepojky. LED je možné „hodiť“ aj do iných voľných portov alebo pripojiť k uvoľneným portom A4 a A5 rozširujúci modul portov (napríklad na základe čipu PCF8574T - poskytne osem ďalších digitálnych vstupných / výstupných portov, modul je ovládaný len pomocou protokolu I2C), do ktorého spárujte výstupy a pripojte LED. V dôsledku tohto rozloženia pripojení zostala zachovaná možnosť bezproblémového prepojenia SPI zariadení, digitalizácie ďalších dvoch analógových signálov, vydávajúcich až štyri PWM signály (napríklad na ovládanie serv). Vo všeobecnosti by som chcel viac voľných signálov, ale ich počet je možné zvýšiť pomocou PCF8574T. V konečnom dôsledku môžete použiť iné Arduino Nano alebo ho nahradiť platformou vhodnejšou pre požadované úlohy – toto riešenie úplne poskytuje určité minimum.
Naša doska tiež poskytuje jednoduché pripojenie k napájaciemu zdroju: sú tu napájacie kontakty 5 V a napätie z akumulátora (až 12,6 V).
Za zmienku stojí jedna nuansa použitej rozširujúcej dosky pre Arduino Nano. Rozširujúca doska v zásade umožňuje spustiť na nej Vbat. Na rozširujúcej doske je nainštalovaný menič napätia, ktorý znižuje vstupné napätie na 5 V a dodáva ho na dosku Arduino Nano, ktorej konvertor ho znižuje na 3,3 V a toto napätie je už z dosky Arduino Nano odstránené a chované k príslušným kontaktom rozširujúcej dosky. To som však neurobil a priviedol som 5 V na príslušný pin rozširujúcej dosky. Okrem toho kontrolka LED na rozširujúcej doske vôbec nesvietila, ak nebola nainštalovaná doska Arduino Nano, to znamená, že táto rozširujúca doska bez Arduino Nano je zjavne nefunkčná. Nerozumel som dôvodom, ale všimol som si tento moment.
Vyrábame túto riadiacu dosku.



Inštalujeme naň elektronické dosky.



Miesta pripravujeme za náš poplatok. Súčasne nainštalujte spínač.


A zbierame všetko.


Teraz musíte urobiť kábel na spojenie dvoch dosiek. Kvôli spoľahlivosti pripájame aj napájacie konektory. Správne a veľmi starostlivo skontrolujte všetko. 12 V by sa malo dostať na 12 V a 5 V na 5 V. Obrázky napájacích a riadiacich dosiek s plošnými spojmi ukazujú „pohľad zhora“, to znamená, že ak dosky otočíte, potom na spodnej, spájkovacej strane dosky, kontakty sú obrátené - to je potrebné vziať do úvahy pri výrobe kábla a preposielaní zodpovedajúcich drôtov v ňom. Konektory som vyrobil jednoducho: najprv bola napísaná séria vodičov s konektormi BLS a 2-krát omotaná páskou. Potom boli všetky dva / tri rady zhromaždené a opäť pevne zabalené páskou. Ukázalo sa, že je to celý a monolitický konektor. Nepoužité kolíky konektora boli jednoducho umiestnené s plastovými konektormi BLS bez kolíkov.
Po vytvorení kábla sa z riadiacej dosky odstránia všetky elektronické dosky a skontroluje sa pomocou multimetra rovnakým spôsobom ako napájacia doska. Pripojíme riadiacu dosku k napájacej doske a pripojíme napájanie. Pomocou multimetra dôkladne skontrolujeme napájacie kontakty všetkých modulov, sme zvedaví na napätie telemetrických signálov - opäť sa presvedčíme, či je všetko správne zapojené. Nemusíte to robiť, všetko sebavedomo zostavte, zapnite napájanie a zistite, že nejakým, samozrejme, mystickým spôsobom sú 5 V a Vbat drôty zmiešané a doska Arduino a modul bluetooth vyhoreli. Ale je lepšie neopakovať chyby iných.
Na fotografii môžete vidieť, že jeden z červených napájacích vodičov je zafarbený striebornou farbou. Toto je označenie vodiča, ktorý prenáša napätie Vbat. Keď je zariadenie zostavené, je užitočné urobiť "kľúče" na pripojenie. Napríklad špeciálne nespájkujte jeden kontakt PLS na konektor a pokazte vzájomnú zásuvku v kábli alebo ju upchajte kusom izolácie - v tomto prípade je implementovaná „ochrana proti bláznom“, odvtedy je možné takýto kábel nainštalovaný bezchybne na zodpovedajúcom konektore na doske, jednoducho preto, že sa inak nenainštaluje (metóda nedáva 100% záruku - internet je plný obrázkov, keď sa najmä vytrvalým jedincom nejakým spôsobom podarí obísť takúto ochranu pomocou závideniahodnej vytrvalosti a ich pozoruhodná sila). Zodpovedajúce kolíky na konektoroch zvyčajne namaľujem. Bolo by užitočné takto označiť vstupné konektory DC / DC meničov na výkonovej doske a zafarbiť príslušné pätice na doske. Tým by sa eliminovala nesprávna inštalácia prevodníkov a pri použití viacerých farieb sa tým odstráni zámena dosiek prevodníkov, ktoré tvoria 5 V a 9 V. Na identifikáciu možno použiť svetlý ženský lak na nechty. Toto malé pravidlo veľmi pomáha pri častej montáži / demontáži vyvíjaného zariadenia v štádiu jeho ladenia a testovania.



Pripojte kábel k napájacej doske.
Ešte by som sa v krátkosti vrátil na začiatok článku, k momentu, keď sme platformu rozdelili na dve časti a „samostatne“ vyňali riadiacu dosku. Vtedy sa to zdalo ako veľmi vyvážené riešenie. Pri pohľade na bohaté pole pinov na rozširujúcej doske Arduino si však uvedomíme, že dobrá polovica týchto pinov nemôže byť použitá v súčasnej implementácii platformy - zabrali sme takmer polovicu I/O konektorov na doske Arduino . A samotný mikrokontrolér „skrúca“ nielen program na vydávanie páru PWM signálov do motorov, ale poskytuje plnú kontrolu nad interným a externým napájaním celej platformy. Stojí to za zváženie - možno stojí za to zahrnúť mikrokontrolér do motorového priestoru našej platformy? Bluetooth „dať“ „nadplatformovej“ elektronike, ktorá bude ovládať zariadenia robota, a premýšľať o kĺbe rozhrania s ňou. Môžete zorganizovať protokol UART (budú potrebné dva kolíky mikrokontroléra), cez ktorý sa bude prenášať dátový paket obsahujúci smer a rýchlosť otáčania motorov, ako aj všeobecný stav platformy ... A potrebujete dobre si premyslieť dizajn, keďže v motorovom priestore nemáme veľa miesta ... Aj keď ... Ak relé nasadíte a posuniete ...
No a to je koniec môjho dlhého a miestami nudného príbehu. Iba „hardvér“ – hardvér platformy – bol vyvinutý, vyrobený a zostavený. Ďalšou časťou práce je softvér. To však neznamená, že ďalej bude musieť pracovať iba programátor. V procese vytvárania firmvéru pre mikrokontrolér a jeho ladenia niekedy musíte vziať multimeter alebo dokonca osciloskop a zistiť, ktorý signál, kde a v akej forme prichádza. Zvyčajne sa práve na začiatku tejto fázy vo väčšej miere objavujú chyby a prehliadky „železnej“ fázy návrhu. Naše zariadenie je veľmi jednoduché, takže ak niečo nefunguje, chyba sa rýchlo nájde. Viete si predstaviť, aké to je pracovať so skutočne zložitými obvodmi? Tam treba byť oveľa opatrnejší a presnejší. Bude tiež potrebné zorganizovať ovládacie rozhranie cez bluetooth so smartfónom - prísť s nejakým protokolom pre informačnú interakciu robota s telefónom. A vyvinúť softvér, s ktorým je pohodlné a pohodlné ovládanie robota. Ale toto je všetko iný, samostatný príbeh.
Niektoré z použitých nástrojov a zariadení
Lepiace pero Bosch. Lepiaca pištoľ. Podľa terminológie Bosch - lepiaca tyčinka. Skvelé mobilné riešenie. Beží na batérii 18650, to znamená, že v budúcnosti nebudú žiadne problémy s výmenou a už sa tam nedá nič pokaziť. Rýchlo sa nahreje (15 sekúnd) a je pripravený na prácu, po vypnutí prestáva fungovať takmer okamžite – netečie z neho lepidlo ako z iných termopištolí. Našiel uplatnenie v každodennom živote a vyšívaní. Jediným negatívom sú nie také bežné lepiace tyčinky: 7 mm, vysoká teplota 150 ... 170C (vhodné sú tyčinky DREMEL GG01 a GG03).

HRUBÉHO 17718. Odizolovací nástroj (striper). Úplná obdoba známeho modelu KBT WS-04A, ktorý mnohí výrobcovia darovali 1 v 1.

HT-202A. Nástroj na krimpovanie vodičov s konektorovými kontaktmi (krimpovač).

Solomon SL-30. Spoľahlivá spájkovacia stanica. Napájacie napätie spájkovačky 24V. Poniklovaný hrot. Presná regulácia teploty.

SAIKE 8858. Je to tiež Element 8032. Je to tiež Yihua 8858. Je to tiež ZHaoxin 858DH. Medzi týmito modelmi existujú rozdiely, ale prevedenie, ohrievače a elektronika sú rovnaké. Dobrá, pohodlná, lacná a skutočne kompaktná spájkovačka. Kúpil som to na dovoznej stránke s následným zdokonalením lacného čínskeho priemyslu: vytrasenie všetkých kovových (!) úlomkov, umytie taviva, spájkovanie kontaktov na doske, výkonový triak bol nasadený na KPT8. Pri spokojnosti je fén ako fén, fúka, teplota a rýchlosť fúkania sú nastaviteľné. Sušič vlasov v zásade ospravedlňuje svoje peniaze. Relatívne nedávny nákup a štatistiky spoľahlivosti sú stále nejasné, ale mám podozrenie, že to bude stačiť na zriedkavú prácu.

Metabo BZ 12SP. Veľmi starý skrutkovač. Vzácnosť. Tieto sa už asi nepredávajú. Umožňuje vykonávať pomerne jemnú prácu vďaka dobrému centrovaniu a absencii hádzania vretena.

Velleman VTHD02. Mini vŕtačka. Alebo ako sa to tiež nazýva - dremel (hoci je to nesprávne, rovnako ako sa kopírky nazývajú kopírky). Keď sa raz kúpila sada v akcii, viac mi lichotila sada trysiek ako samotná vŕtačka. S prepracovaním výživy to však dopadlo celkom dobre. Funguje z natívneho zdroja, no pri záťaži je to pre ňu akosi ťažké. Asi pred dvoma rokmi, samozrejme, výlučne dočasne, bol vyrobený mobilný zdroj z priehradky na štyri batérie 18650 s nastaviteľným výstupom. Minidrill sa stal autonómnym. S takým výkonom sa minidrill začal cítiť oveľa lepšie a ukázalo sa, že je to veľmi užitočné zariadenie v domácnosti.


Noble NB4000P-4. Multimeter. Je vhodné, aby boli drôty úplne odstránené vo vnútri. Získané v ťažkých študentských rokoch. Teda na dlhú dobu. Drôty sa už dávno odlomili - musel som "operovať" z iného neúspešného multimetra. Teraz sú drôty preč. Batéria a poistka boli niekoľkokrát menené. Funguje doteraz - úžasná spoľahlivosť s priemernou presnosťou.

Fluke 179. Vysoko presný multimeter. Kvalitný, pohodlný a hlavne presný nástroj.

Prijaté ako reklama. Aj keď... prečo nie – kde je potom moja provízia? Všetky tieto nástroje sú poskytované pre všeobecné informácie. Raz som napríklad objavil odstraňovače, ktoré menia proces odizolovania drôtov z rutiny na potešenie a vôbec neľutujem, že som si kúpil BOSCH GluePen. Možno niekomu pomôže tento malý výber.
Na zostavenie vášho robota nie je vôbec potrebné mať pestrý a drahý nástroj, aj keď určite skvalitní prácu a prinesie z nej viac radosti. Stačí mať obyčajnú spájkovačku, pár skrutkovačov a vŕtačku. Nakoniec, kedysi dávno mal autor tohto článku k dispozícii iba kliešte, kladivo, pár skrutkovačov, medený drôt, skobu (ešte niekde existuje!) A dve vŕtačky, kusy telefónnych drôtov a veľa modrej elektrickej pásky (často - predtým používanej), to úplne stačilo na výrobu jednoduchého auta, ktoré po stlačení tlačidla išlo samo.
Hlavné komponenty
Na základe populárneho dopytu čitateľov poskytujem odkazy (ebay / aliexpress) na hlavné komponenty. Odkazy fungujúce od septembra 2016. Všetko bolo objednané pred polrokom (február-marec 2016), tak odporúčam pohľadať navyše - možno teraz kúpite výhodnejšie.
Podvozok, motory, kolesá, spojovacie prvky - platforma (výber z dvoch farieb) + 4 * (koleso 80 mm + spojovacie prvky + motor (výber z troch rýchlostí))
Venujte pozornosť nasledujúcej súprave - 130 mm koleso + upevňovacie prvky + motor s Hallovým snímačom
Pozor na priestranné batérie (pracoval som s nimi niekoľkokrát - tieto batérie majú zvyčajne rovnakú skutočnú a deklarovanú kapacitu, t.j. naozaj majú 3400 mAh!) - Panasonic NCR18650B 18650 / 3400mAh / 3,7V / nechránený Modul Bluetooth HC-06 5
0.9% Je to strašné - kde je kultúra reči, normálna stavba viet... autor sa potrebuje naučiť syntax, aj morfológiu! 2
5.9% Ťažko sa mi odpovedá alebo vysvetľuje v komentároch. 12
Jednou z možností na vytváranie robotov založených na Arduino a iných počítačových doskách je použitie hotových puzdier a vývoj vlastnej výplne. Na trhu je možné nájsť dostatočné množstvo takýchto rámov, ktorých súčasťou je aj mechanický základ (kolesá, pásy, pánty a pod.). Po prevzatí hotového tela sa môžete plne sústrediť na programovanie robota. Ponúkame malý prehľad takýchto kostrových robotov.
Prečo sú potrebné telá a kostry robotov?
Vytvorenie robota je viacstupňový proces vrátane návrhu, montáže a programovania. Znalosti robotiky hraničia s fyzikou, mechanikou a algoritmizáciou. Ašpirujúci mladí robotici inklinujú ku každej fáze tvorby robota inak. Pre niektorých ľudí je jednoduchšie vytvárať mechanické časti robota, ale programovanie je náročné. Niekto naopak ľahko naprogramuje logiku správania robota, ale proces vytvárania mechanického modelu je náročný.
Tí, ktorým je ťažké navrhnúť mechaniku a ktorých viac vytáča proces výberu rôznych senzorov a navrhovania robotickej logiky, by mali venovať pozornosť rôznym mechanickým základom pre stavbu robotov. Predávajú sa bez elektroniky, v skutočnosti ide o telo alebo kostru budúceho robota. Zostáva len pridať k nim „mozog“ (napríklad poplatok Arduino), nervy a svaly (senzory a akčné členy) a priviesť ich k životu (program). Niekedy takéto prípady dokonca obsahujú motory alebo senzory.
Platformy na 4 kolesách - základ stroja Arduino
Plošina na kolesách je zďaleka najjednoduchším a najefektívnejším základom na stavbu robota. V predaji je veľa rôznych polotovarov tohto typu. Niektorí z nich:
Platforma na vytvorenie robota na Arduine, vyrobené z hliníkovej zliatiny. Plošina je vybavená 4 kolesami, z ktorých každé je napojené na samostatný motor. Motory sú zahrnuté. Platformu možno použiť ako základňu auta alebo akéhokoľvek iného riadiaceho robota. Veľkosť plošiny je cca 20 x 20 cm Súčasťou sú aj skrutky, matice a drôty na pripojenie motorov.
Takáto základňa pre vášho budúceho robota sa dá kúpiť za približne 75 dolárov v internetovom obchode DX.com.
Ďalší štvorkolesová platforma na vytvorenie robota založeného na Arduine púta pozornosť svojimi kolesami. Majú priemer 80 mm, šírku 60 mm, pôsobia elegantne a spoľahlivo. Táto platforma má 1,5 mm hrubú akrylovú základňu. Telo má dobrú stabilitu a je vhodné na stavbu rýchlo sa pohybujúceho robota. aliexpress predáva tohto kostlivca za 60 dolárov. Súprava je podobná predchádzajúcej - kolesá, motory, drôty a skrutky sú už v súprave.

Dvoj- a trojkolesový podvozok na stavbu kráčajúcich robotov
Ďalšie trojkolesová platforma na vytvorenie robota na báze Arduina motory sú spojené len s dvoma kolesami, čo znižuje náklady. V internetovom obchode DX.com sa takéto šasi predáva za 20,5 dolára. Základňa je vyrobená z číreho akrylu. Obsahuje 2 motory, skrutky, matice, vodiče, súpravu batérií na 4 batérie AA. Rozmery cca 20 x 10 cm.

Trojkolková platforma pre robota Arduino. Foto dx.com

Dvojkolesová základňa pre robota. Foto dx.com
Pásový podvozok pre tanky na Arduine
Pásový podvozok stabilnejšie ako tie na kolesách. Navyše v tomto prevedení stačia na uvedenie systému do pohybu iba dva motory, čo znamená, že cena bude nižšia ako cena štvorkolesových platforiem. Najbežnejším modelom na tratiach je samozrejme tank, no takáto základňa sa môže stať platformou pre robota akéhokoľvek tvaru.
Podvozok Caterpillar na vytvorenie tanku robotazaložené na Arduino. Obsahuje 2 motory, húsenicový pohon, skrutky, matice. Rozmery tohto podvozku sú 18,7 cm x 11,5 cm x 4,3 cm.V internetovom obchode DX.com tento pásový podvozok stojí 42 dolárov.

Podvozok Caterpillar pre robota. Foto dx.com
Kryt robota Arduino Spider
Pavúk- pomerne populárna forma robotov, takže v predaji sú aj také kostrové puzdrá.Konštrukcia pavúka, na rozdiel od robotov na kolesách, umožňuje pohyb v akomkoľvek smere.
Prvý pavúk a v našej recenzii stojí asi 100 dolárov na Aliexpress.

Puzdro pre robota pavúka. Foto: aliexpress.com
Tento kufrík nie je dodávaný s elektronikou, servami, tie je potrebné dokúpiť. S týmto modelom pavúka sa odporúča použiť servo MG 995 Servo. Je zábavné, že takýto disk na stránke Aliexpress sa dá kúpiť za 33 dolárov aj za 5 dolárov (aj keď v tomto prípade budete musieť kúpiť 10 kusov). Pohon je potrebný pod každou labkou.
Okrem toho, na ovládanie veľkého počtu serv je potrebný viackanálový servoregulátor. Celkové náklady na pavúka môžu byť dosť vysoké.
Ďalší šesťnohý skelet pavúčí robot alebo dokonca švábový robot upútala moju pozornosť svojou cenou 42,5 $. Robot na šiestich kovových labkách by sa mal ukázať ako stabilný, aj keď nie príliš manévrovateľný. Kostra tohto švába je dlhá 24 cm, široká 18 cm a vysoká 12 cm.Tohto čierneho švába si môžete zakúpiť na stránke Aliexpress.

Kryt pre robota šváb. Foto: aliexpress.com
Rámy humanoidných robotov
Model pôsobí dosť zaujímavo humanoidný robot stojí asi 105 dolárov. Tiež tu nie je žiadna elektronika, ale je tu veľký priestor pre kreativitu. Vytvorenie humanoidného robota a naprogramovanie ľudskej chôdze nie je ľahká a zaujímavá úloha. Zakúpením takejto kostry na webovej stránke internetového obchodu Aliexpress si môžete začať sami vytvárať humanoidného robota. Ak veríte popisu výrobcu, tak na základe tejto karsky si môžete vyrobiť aj tanečného robota.

Škrupina pre humanoidného robota. Foto: aliexpress.com
Hotový robot, hotové puzdro alebo vytvorenie robota Arduino od začiatku?
Hotové kompletné roboty založené na doske Arduinovhodné pre tých, ktorých elektrické obvody zvlášť nelákajú. Zakúpením modelu pracovného robota, t.j. skutočne dokončená high-tech hračka, môžete prebudiť záujem o vlastný dizajn a robotiku. Otvorenosť platformy Arduino umožňuje vyrábať nové hračky z rovnakých komponentov. Cena takýchto robotov sa pohybuje okolo 100 dolárov, čo je vo všeobecnosti relatívne málo.
Hotové trupy, ktoré sme preskúmali v tejto recenzii, naznačujú väčšiu predstavivosť a väčšiu rozmanitosť robotov. Nie ste v nich obmedzení len na Arduino dosky, využijete aj iné „mozgy“. Výhodou tejto metódy oproti vytváraniu robota od nuly je, že sa nemôžete nechať rozptyľovať hľadaním materiálov a vývojom štruktúr. Takýto robot vyzerá dosť vážne a vyzerá ako priemyselný.
Najzaujímavejšie, no podľa nás aj najťažšie je úplne nezávislé vytvorenie robota. Vývoj karosérie z improvizovaných materiálov, prispôsobenie autíčok na tieto účely a ďalšie zastarané vybavenie sa môže stať nemenej vzrušujúcim ako programovanie správania robota. A výsledok bude úplne jedinečný.
Ak sa práve začínate učiť Arduino robotiku, odporúčame náš kurz.
Všetky ceny sú k 22.05.2014.
« Podvozok pre robota za 200 rubľov
Každý robotik, ktorý začína vytvárať robota, premýšľa o podvozku. Tu je skvelý nápad na výrobu s jednoduchosťou a nízkymi nákladmi podvozok robota z čínskych áut.
Na vytvorenie podvozku potrebujeme dva najnechutnejšie čínske hračkárske tanky na elektrickú trakciu. Nemusia sa vôbec vedieť otáčať – je to oveľa lacnejšie.
Škaredosť má dve výhody: nízku cenu a nedostatok ľútosti pri analýze nádrží.
Ako varujú nápady, takí lacní potomkovia čínskeho priemyslu pekelne páchnu, takže ich nebude škoda.
Takže máme darcovské nádrže. Choď!
Odstránime kryty z donorových nádrží.

Priestory na batérie sú nám stále užitočné, a tak ich jednoducho očistíme od prebytočného plastu.

Budeme potrebovať obe priehradky (z každej nádrže).

Zlepte priehradky na batérie.

Odhryzneme a odpílime nápravy až k samotným prevodovkám, aby sme z jedného podvozku tanku dostali polovicu podvozku pre robota.

Dva prevody používané na otáčanie náhubku boli odstránené ako zbytočné.
Dobrý deň, mozgových inžinierov! Tu je návod, ako na to ako na to jednoduchý, malý, mobilný, stabilný a terénny robot, bez zbytočných zariadení a so všetkými hnacími kolesami.

S týmto dizajnom som už nejaký čas experimentoval. mozgové remeslá a dosiahli dobré výsledky, ktoré uverejňujem v tomto článku. Napríklad podvozok robota je zostavený z hliníkových dielov Actobotics, čo uľahčuje montáž a poskytuje stabilitu, nízku hmotnosť a spoľahlivosť.
Každé zo šiestich kolies má vlastný motor, ktorý zvyšuje trakciu, pričom motory každej strany, ľavého a pravého, sú spojené do skupín po troch, čiže robot manévruje ako tank. Veľké kolesá zvyšujú flotáciu a tlmenie nárazov a tiež zabraňujú poškodeniu pri pádoch.
Kontrolované remeslo mikrokontrolér Arduino, ktorý je zodpovedný za všetku elektriku a má tiež potenciál na ďalšie vylepšenia. Základom diaľkového ovládača je modul XBee, ktorý sa ľahko ovláda, je spoľahlivý a dáva dosah signálu väčší, ako je potrebné.
Krok 1: Hliníkový rám
Na zostavenie rámu potrebujeme:
3 hliníkové rohy "Actobotics" každý 40 cm.
6 hliníkových držiakov pre motory
6 motorov 12V s priemerom hriadeľa 6mm
6 koliesok 127 x 62 mm
6 pneumatík 5,6 cm
6 šesťhranných nábojov kolies
36 skrutiek M3x8
hliníkový plech 343x190mm
8 šesťhranných podložiek M3x40mm




Krok 2: Príprava rámu






Jeden z hliníkových rohov prerežeme na polovicu kovovým pilníkom. Na ďalších dvoch pevných rohoch označíme miesta pre konzoly mozgové motory, vyvŕtajte 3 mm otvory pre montážne skrutky (na fotografii modré) a upevnite samotné držiaky do rohov.
Krok 3: Montáž rámu












Motory namontujeme na držiaky a umiestnime ich čo najnižšie. Potom pripevníme dlhé rohy navzájom dvoma krátkymi (ktoré boli odrezané skôr) na miestach znázornených červenou farbou.
Potom na hliníkový plech namontujeme 8 rozperiek, pomocou ktorých ho z rohov pripevníme k rámu.
Krok 4: Elektronika





















Tento krok znamená vás mozgová skúsenosť práca v oblasti elektroniky, najmä montáž obvodov s Arduino a XBee.
Na montáž elektrického obvodu remeslá potrebné:
Lítiová batéria 3S 4000 mAh
digitálny elektronický spínač - potrebný pre prípadnú budúcu modernizáciu a môže byť nahradený jednoduchým spínačom dimenzovaným na prúd nie viac ako 10 ampérov.
Modul Arduino Mega 2560
doska prieskumníka xbee
XBee Pro 60mW vysielač s anténou
Riadiaca doska Sabertooth 12A pre dva motory
ULN 2803 a IC zásuvka
Na hliníkovom štítku označíme tri čiary zodpovedajúce trom osám motorov (na fotografii vyznačené červenou farbou), potom medzi prvé dve osi pripevníme lítiovú batériu a potom nainštalujeme elektrický spínač, ak sa stále rozhodnete používať to.
Poďme k Arduinu: prispájkujte červený vodič k Vin na zadnej strane dosky, čierny k dvom GND a biely k TX1 (pin 18), podľa fotografie. Pri montáži dosky ju skúste umiestniť medzi kolieska tak, aby bol USB port ľahko dostupný pre programovanie. Samotnú dosku pripevníme k doske šiestimi skrutkami s dvoma podložkami, aby sa doska zdvihla nad dosku. Používajte aj plastové podložky a matice, aby ste predišli skratom.
Riadiacu dosku Sabertooth namontujeme priamo na hliníkovú platňu a pripevníme ju štyrmi skrutkami a maticami. Doska tu plní aj úlohu radiátora. Ďalej, so zameraním na schému, spájame komponenty domáce spolu.
Modul XBee namontujeme na dosku XBee a vytvoríme 4 pripojenia: 5V až 5V, GND k zemi, DIN k TX3 (pin 14) a Dout k RX3 (pin 15).
A na záver, na malej doske s plošnými spojmi zostavíme obvod zodpovedný za prevádzku LED svetlometov na prednej časti plavidla, pričom sa pri montáži pozrieme aj na schému.
Krok 5: Programovanie Xbee


Skôr ako začnete s programovaním modulu XBee, je vhodné prečítať si návod.
Okrem vedomostí potrebujeme:
Doska prieskumníka USB XBee
USB kábel
Po nainštalovaní a aktualizácii programu X_CTU nakonfigurujeme každý modul XBee súčasne ako prijímač a vysielač. Sada tri parameter mozgu:
Pre prijímač: DL=321, MY=123 a BD=3 (9600 baud).
Pre vysielač: DL=123, MY=321 a BD=3 (9600 baud).
Krok 6: Zostavenie diaľkového ovládača
Potrebné materiály:
Lítiová batéria 3S 800 mAh
Arduino Nano 5V, 16MHz alebo ekvivalent
doska prieskumníka xbee
XBee Pro 60mW modul s anténou
joystick
LED
odpor 220 ohmov
dva miniatúrne spínače
plastové puzdro



Po zostavení základného obvodu je výroba diaľkového ovládača jednoduchým krokom. V tomto prípade sa ako obvykle zameriame na schému. Kód pre Arduino
Krok 7: Nakoniec
Zozbierané mozgový trik má tieto vlastnosti: dĺžka - 42 cm, šírka - 32 cm, výška - 12,5 cm, hmotnosť - 3,430 kg.
Otáčky závisia od zvolených motorov, ten môj má robotický mozog s prevodovým pomerom 100:1 dosahuje 0,7 m/s (2,4 km/h). Ak znížite prevodový pomer, otáčky sa budú zvyšovať s klesajúcim ťahom. Naopak, ak zvýšite prevodový pomer: rýchlosť sa zníži, ale ťah sa zvýši.
Video ukazuje off-roadové kvality domáce.
Dôležité body:
pri montáži LED dbajte na polaritu;
ak sa koleso otáča v opačnom smere, stačí zmeniť polaritu motora;
ak sa celá skupina kolies otáča v opačnom smere, potom zmeňte polaritu na doske Sabertooth;
ak sa všetky kolesá otáčajú opačným smerom, potom otočte polaritu napájacích vodičov dosky Sabertooth.
Doska Sabertooth má zabudovaný snímač napätia batérie, takže ak domáce prestane fungovať, stačí nabiť batériu.
Plány inovácie: začnite s vašimi vymývanie mozgov Chcem pridať miniatúrnu videokameru a audio-video vysielač, ktoré sa používajú v leteckom modelárstve. Plánuje sa aj inštalácia robotického ramena-manipulátora na plavidlo.
Ale to je v pláne, ale zatiaľ vám ďakujem za pozornosť a veľa šťastia vo vašej práci!

Dnes začínam publikovať články o tvorbe môjho mobilného robota. Na rodinnej rade sa rozhodlo dať mu meno Robotosha, preto som tak pomenoval aj svoj blog. Účelom jej vytvorenia je štúdium rôznych algoritmov a prvkov robotických systémov v praxi.
Momentálne je môj robot štvorkolesová platforma, na ktorej je nainštalovaná doska s mikrokontrolérom, ktorá je zavesená na množstve senzorov a rozhraní na interakciu používateľa. Softvér je v plienkach, preto podrobne rozoberiem, čo a prečo je v súčasnosti takto implementovaný a postupne sa posúvam ďalej, pridávam funkcionalitu a dodávam mu „myseľ“. Je to môj prvý robot, takže niektoré kroky pri jeho tvorbe môžu byť chybné alebo slepé uličky.
Nápad
Myšlienka v prvej aproximácii je nasledovná: autonómny robot s nasledujúcimi vlastnosťami:
- 4-kolesová platforma
- Použitie v interiéri (apartmány)
- Bezkontaktné spôsoby detekcie prekážok, aby sa zabránilo kolíziám
- Režimy ovládania:
- autonómny režim „náhodnej prechádzky“ s cieľom zostaviť mapu priestorov
- režim diaľkového ovládania
- režim vykonávania hlasových príkazov s rozpoznávaním hlasu
- Monitorovanie batérie a samonabíjanie
- Výstup informácií na znakový LCD displej
- Zvukový alarm
Podvozok robota
Ako podvozok som sa rozhodol použiť kupovanú štvorkolesovú platformu z čisto ekonomických dôvodov (nech som rozmýšľal akokoľvek, vyšlo mi to drahšie na diely a táto je jedna z najlacnejších, aké som našiel). Moja voľba padla na podvozkovú sadu DAGU 4WD, čo je 4-kolesová platforma s motormi. Takto vyzerá balíček.

Plošiny na inštaláciu rôznych nástavcov sú vyrobené z červeného akrylátového skla s veľkým počtom montážnych otvorov na inštaláciu snímačov, ovládačov, servomotorov. Akrylátové sklo, musím povedať, sa vŕta veľmi ľahko, takže aj keď v budúcnosti niečo nespadne do hotových otvorov, vždy môžete ľahko vyrobiť ďalšie. Kolesá sú pogumované. Kolektorové motory s plastovými prevodmi.
dosky
Rozmery: 175 x 109 x 3 mm
Vzdialenosť medzi doskami (výška priložených stojanov): 24 mm
Svetlá výška: 45 mm
kolesá
Priemer koliesok: 67 mm
Šírka ráfika: 26 mm
Motory
Napätie: 4,5 - 7,2 V
Voľnobežné otáčky: 90 ± 10 ot./min
Prúd naprázdno: 190 mA (max. 250 mA)
Krútiaci moment: 0,8 kg cm
Maximálny prúd: 1A
Zloženie trvá dvadsať minút. Zostavený podvozok vyzerá takto:



S motormi, aby som bol úprimný, mal som prepadnutie. Tieto motory nie sú navrhnuté tak, aby boli vybavené snímačmi, čo je pre mňa dôležité, pretože plánujem používať snímače na poskytovanie spätnej väzby pre presnejšie polohovanie. Preto s najväčšou pravdepodobnosťou, ak nebude možné tieto prerobiť, vymením motory v budúcnosti za iné.
Vo všeobecnosti vyzerá zostavená platforma celkom pekne. Nebyť problému s enkodérmi, bol by som 100% spokojný.
Ako hodnotíte tento príspevok?